

Natural gesture finger recognition algorithm
A recognition algorithm and recognition method technology, which is applied in the field of rich input primitives and recognition of operating hands and fingers in multi-touch interfaces, and can solve problems such as lack of touch devices
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
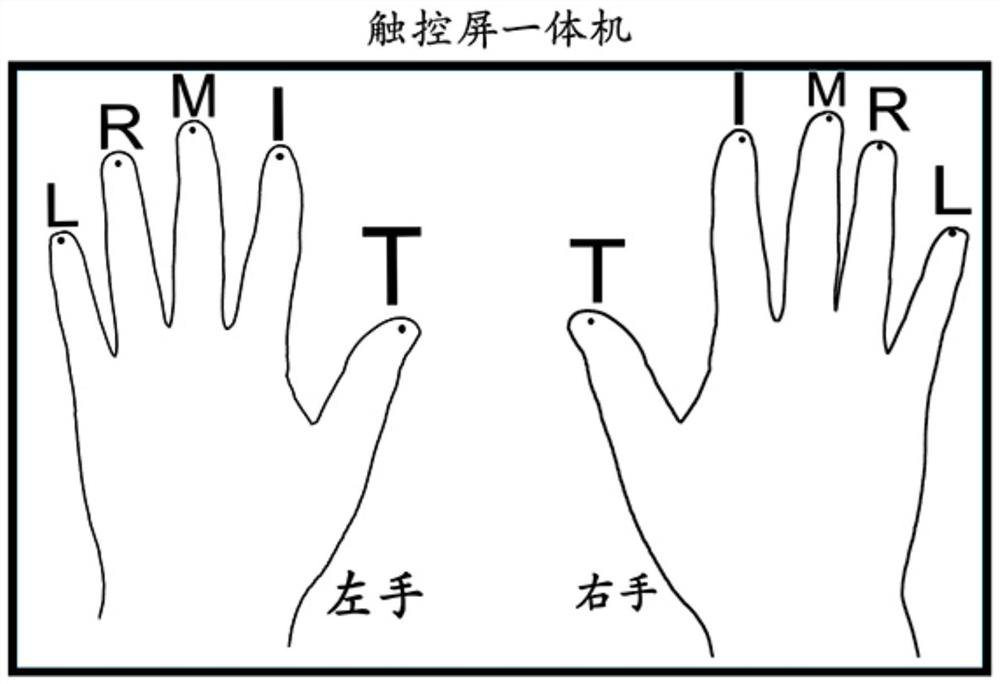
[0010] The algorithm is triggered when 5 touch points touch the interface. Firstly, the coordinates of 5 touch points are obtained, and then the sum of the distances from one touch point to the other 4 touch points is calculated cyclically, and the largest touch point is the thumb touch point T .
[0011] Calculate the distance from the remaining 4 contacts to point T, and the smallest one is the index finger contact I.
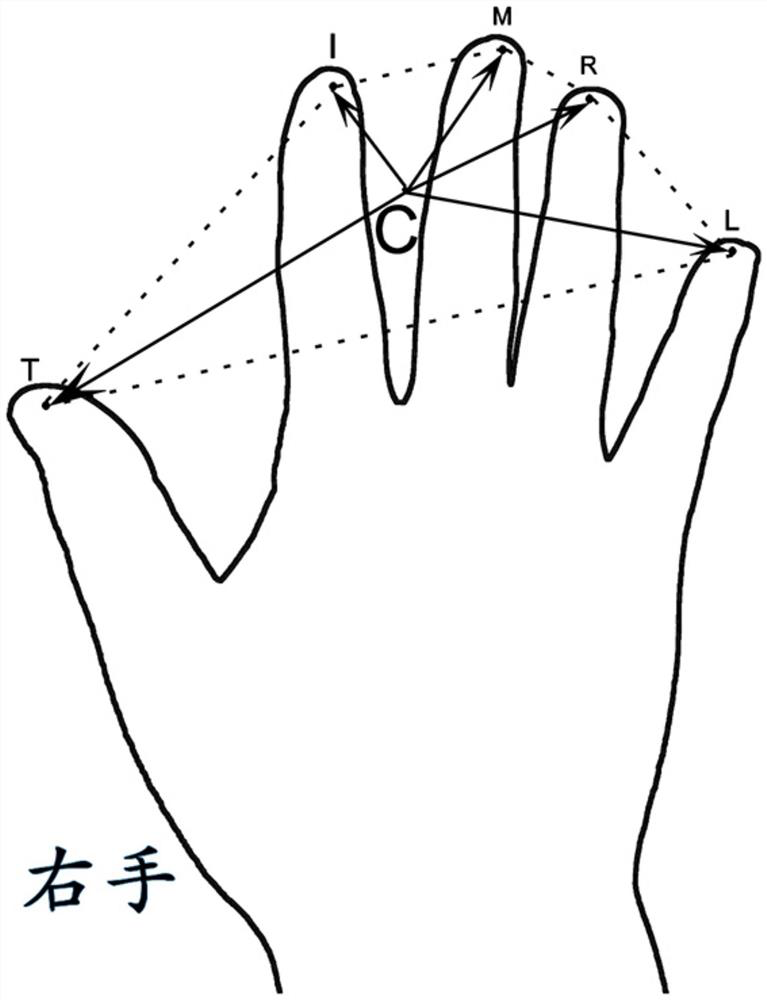
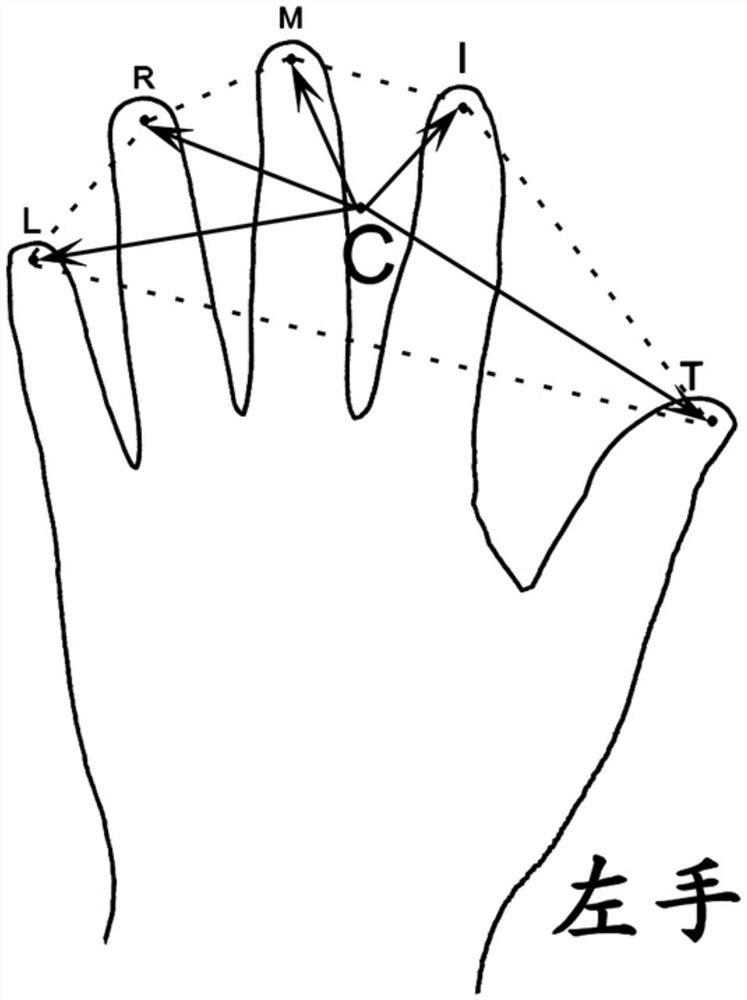
[0012] Calculate the geometric center point C of the 5 contacts, calculate Whether the operating hand is the left hand or the right hand is determined based on the positive or negative of the cross product.
[0013] Calculate the 3 vectors with C as the starting point and the other 3 finger contacts as the end points, in the arrive In the rotation direction of , the finger contacts corresponding to the three vectors are the middle finger contact M, the ring finger contact R and the little finger contact L in turn.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More