

Method, system and storage medium for constructing 3D topology map of rescue area
A topology map and construction method technology, applied in the field of rescue map construction, can solve problems such as the inability to implement the rescue plan at the rescue site, achieve the effect of reducing the observation angle, reducing the amount of data and transmission difficulty, and speeding up
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0040] like Figure 4 As shown, this embodiment discloses a method for constructing a 3D topology map of a rescue area, including the following steps:
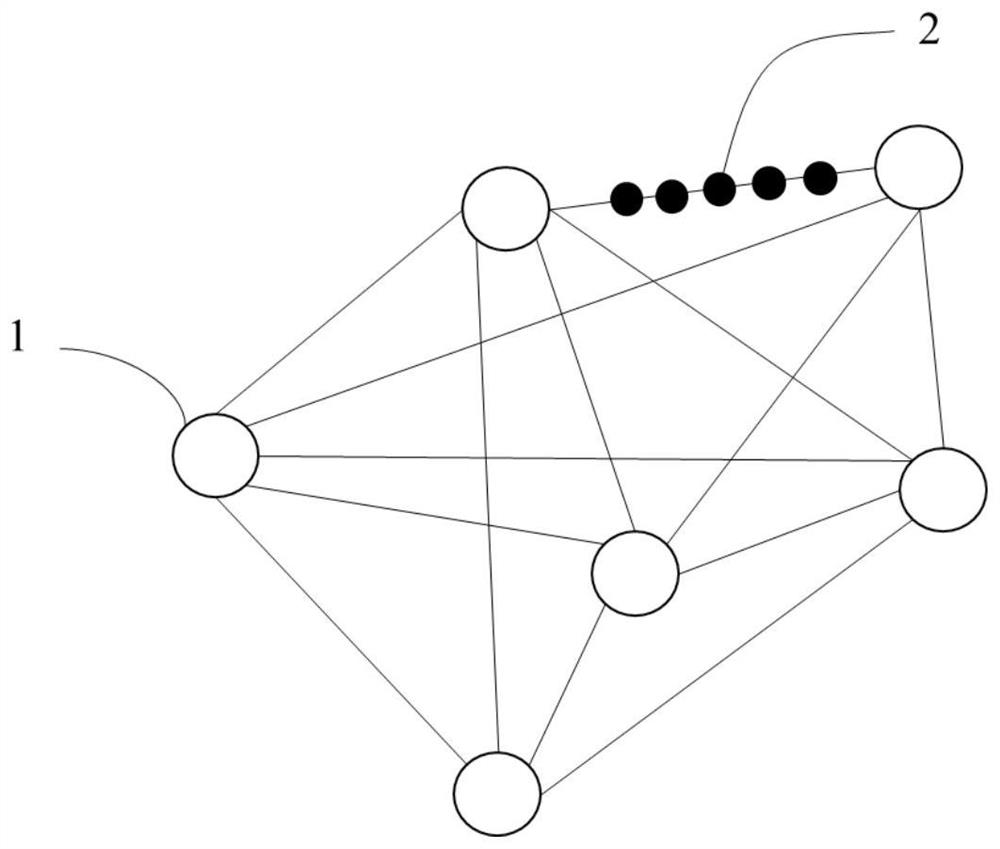
[0041] Divide the observation area of the rescue area into a key area 1 and a non-critical area 2, where the key area 1 refers to the preset rescue may occur, and the non-critical area 2 refers to the observation area connecting any two key areas 1;
[0042] Obtain the 3D panorama of the fusion depth information of the key area 1 in the rescue area and the corresponding position information, and the one-way image and the corresponding position information in the non-key area 2;
[0043] Based on the location information of key area 1 and the location information of non-critical area 2, the spatial positions of key area 1 and non-critical area 2 are connected, and according to the 3D panorama of key area 1 and the one-way image in non-critical area 2 Build a 3D topology map of the rescue area.
[0044]In addition, in this e...
Embodiment 2
[0048] The second embodiment is a preferred embodiment of the first embodiment, and the difference from the first embodiment is that the specific steps of the method for constructing a 3D topology map of the rescue area are refined:
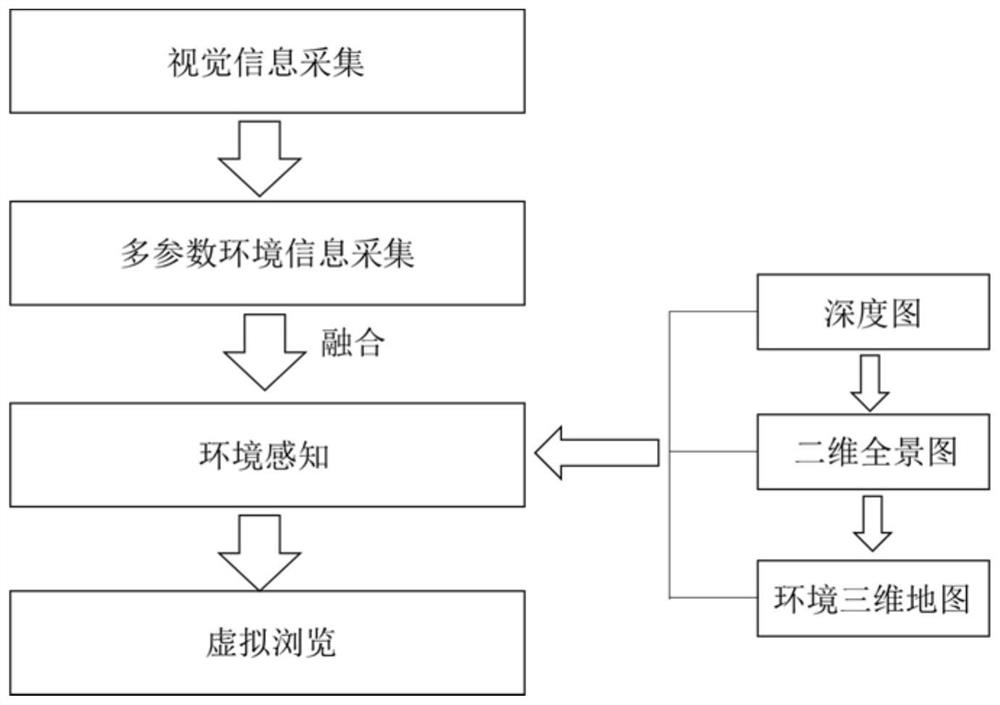
[0049] like figure 1 and figure 2 As shown, in this embodiment, a method for constructing a 3D topology map of a rescue area is disclosed, including the following steps:
[0050] Step 1: Visual and environmental information collection
[0051] The observation area of the rescue area is discretized, and the discretized observation area is divided into key area 1 and non-critical area 2. Among them, the key area 1 refers to the observation area of great significance for rescue, or the area that needs to be paid attention to in the search and rescue, and the non-critical area 2 refers to the observation area connecting any two key areas 1; This point is a critical location for rescue. The moving route of the robot is the non-critical area 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More