

Multi-strategy obstacle avoidance logic and control method for Mars landing
A control method and multi-strategy technology, applied in attitude control, non-electric variable control, control/regulation system, etc., can solve problems such as complex timing, complex and variable, and large dynamic range, and achieve fast obstacle avoidance tasks and soft landings Effect that the probability of success improves
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the object, technical solution and advantages of the present invention clearer, the implementation manner of the present invention will be further described in detail below in conjunction with the accompanying drawings.
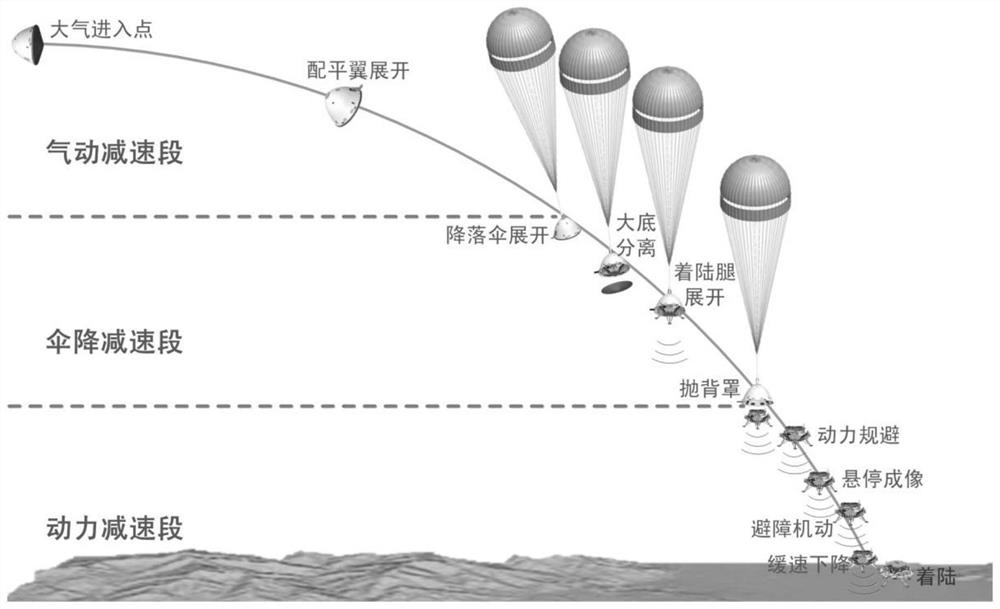
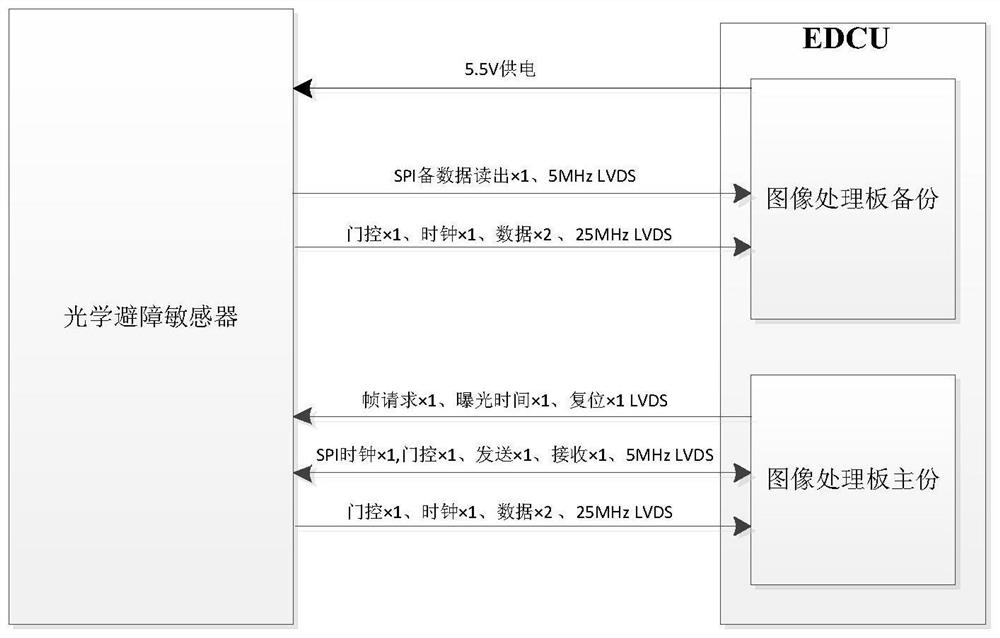
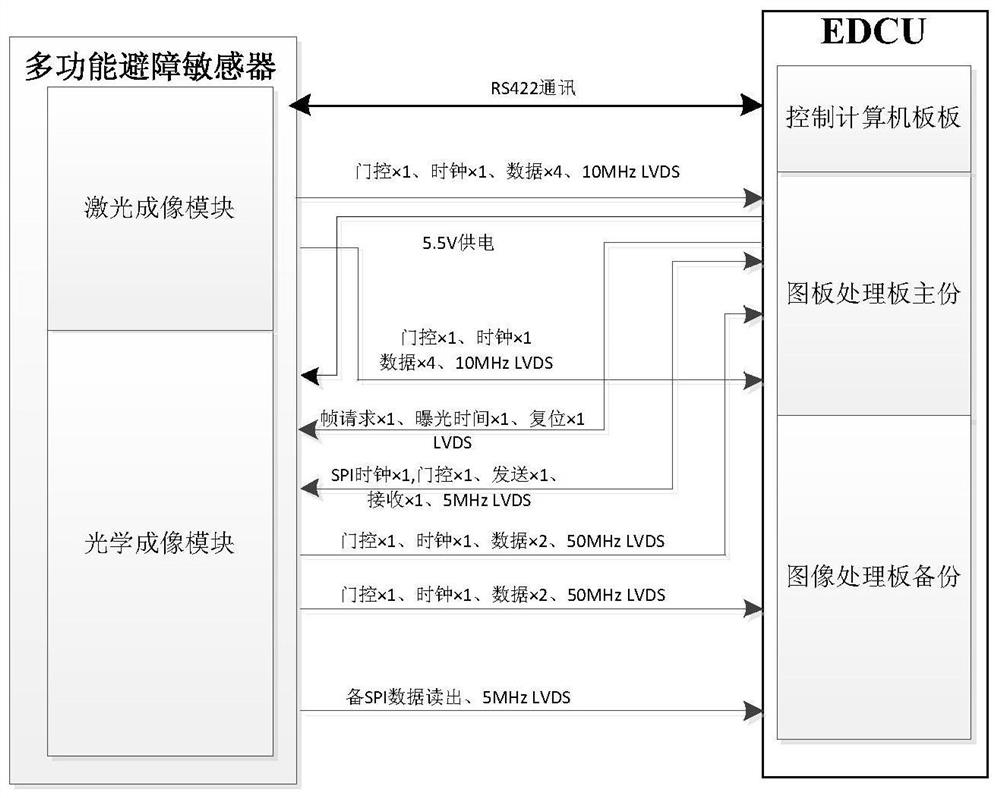
[0060] During the landing process, the back cover avoidance, landing area obstacle recognition and avoidance tasks of the landing platform are jointly completed by the Entry, Descent Control Unit, EDCU, optical obstacle avoidance sensor and multifunctional obstacle avoidance sensor. Among them, the EDCU contains the control computer board and the main / backup image processing board, etc., and is the core controller of the landing process, used for attitude and orbit control calculation, multi-functional obstacle avoidance sensor and optical obstacle avoidance sensor image data during landing processing and safe point solving, etc. The multifunctional obstacle avoidance sensor includes a laser three-dimensional imaging module and an opti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More