

Robot capable of stably crossing obstacle area and operation method thereof
A technology of robots and robot bodies, applied in the field of robots, can solve the problems of robots getting stuck, affecting shooting, and robots not moving normally, and achieving the effect of avoiding getting stuck and reducing the support of obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
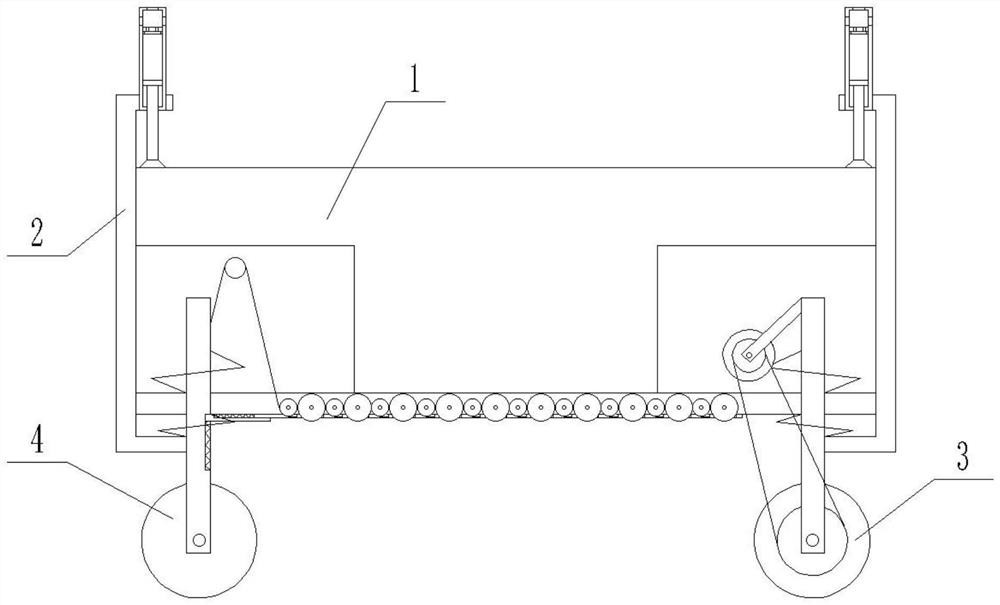
[0017] Specific implementation mode one: as Figure 1-7 As shown, this embodiment describes a robot that can smoothly pass through obstacle areas, including a robot body 1, two front wheel sets 3 and two rear wheel sets 4; the bottom end of the robot body 1 is close to one end in the forward direction A front wheel set 3 is provided, and a rear wheel set 4 is provided on the other side of the bottom end of the robot body 1 .
specific Embodiment approach 2
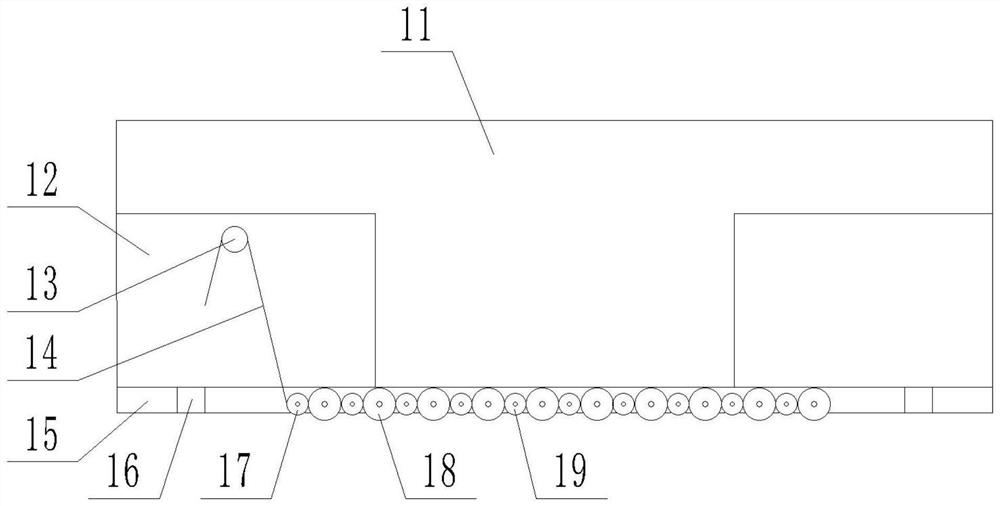
[0018] Specific implementation mode two: as Figure 1-7 As shown, this embodiment is a further description of specific embodiment one. The robot body 1 includes a housing 11 and a base plate 15; the base plate 15 is fixedly connected to the lower end of the housing 11; the housing 11 and the base plate Both sides of the joint 15 are provided with grooves 12; the bottom plate 15 is provided with two through holes 16, and each through hole 16 communicates with the corresponding groove 12;
[0019] The front wheel set 3 includes a road wheel I31, a rotating shaft I33, a connecting rod I34, a spring I35 and a spring II36; the lower end side of the connecting rod I34 is connected to the road wheel I31 through the rotating shaft I33, and the other side of the connecting rod I34 is fixedly connected to There is a drive motor connected to the rotating shaft I33, and the connecting rod I34 is slidingly fitted with the corresponding through hole 16; the lower end of the spring I35 is fi...
specific Embodiment approach 3
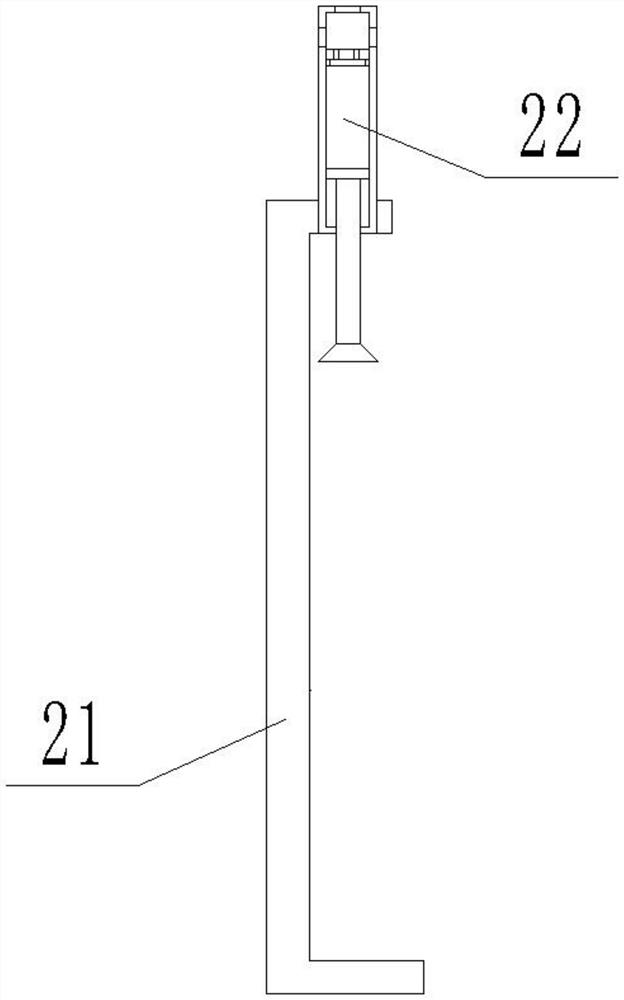
[0021] Specific implementation mode three: as Figure 1-7 As shown, this embodiment is a further description of Embodiment 1. A robot that can smoothly pass through obstacle areas also includes two connecting devices 2; one of the connecting devices 2 is located at the front end of the housing 11 and is fixedly connected On the side of the connecting rod I34; the other connecting device 2 is located at the rear end of the housing 11 and is fixedly connected to the side of the connecting rod II43.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More