

Method and device for determining driving track of automatic driving vehicle and electronic equipment
A technology for vehicle driving and automatic driving, applied in directions such as road network navigators, can solve problems such as short predicted trajectories, difficulty in eliminating the overlap of obstacle driving trajectories, and inability to ensure no collision between vehicles and obstacles, and improve safety. , the effect of avoiding vehicle collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the technical solutions of the present application will be clearly and completely described below in conjunction with the accompanying drawings. Obviously, the described embodiments are part of the embodiments of the present application, not all of them. the embodiment. Based on the embodiments in this application, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the scope of protection of this application.
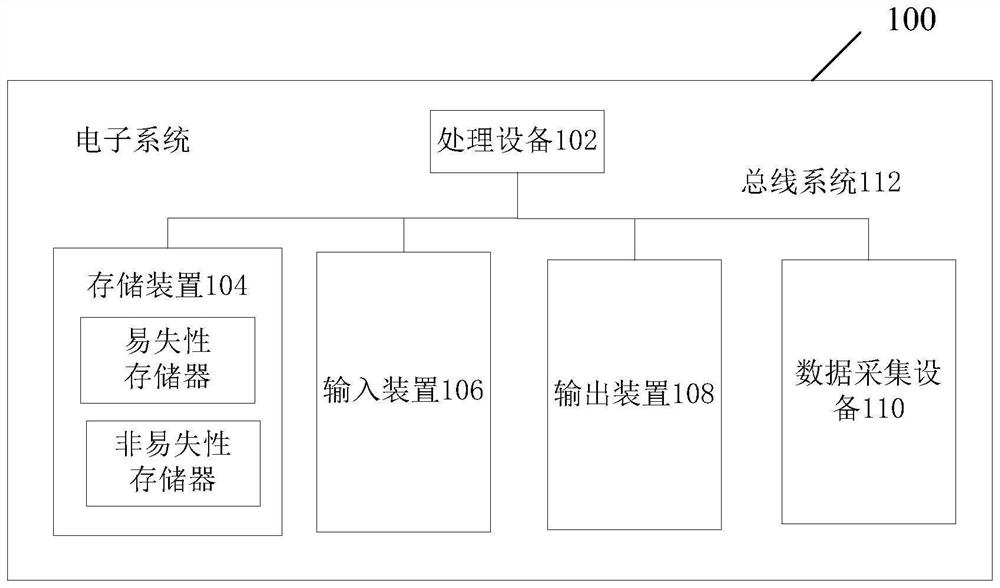
[0033]The execution process of autonomous driving tasks can be roughly divided into three stages: perception fusion, decision planning and control. According to the trajectories of the self-vehicle, surrounding environment and obstacles integrated by the perception layer, the self-driving vehicle can make reasonable decisions in the current state (keep following the car, change lanes,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More