

Point cloud completion method based on anchor point detection
A point cloud and anchor point technology, applied in the field of point cloud completion, can solve problems such as irregularly shaped point clouds and poor point cloud completion effects, and achieve the effect of improving the effect
Pending Publication Date: 2022-04-15
NANCHANG UNIV
View PDF0 Cites 0 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
[0005] At present, most network models based on deep learning are not effective for point cloud completion. The reason is that these models simply classify the task of point cloud completion as a regression problem and train neural networks to predict point cloud coordinates. Therefore, Can only generate roughly correct point clouds with irregular shapes
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
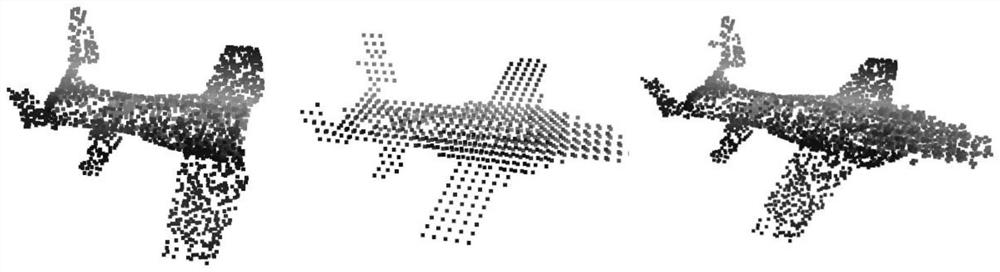
[0048] An incomplete aircraft point cloud in the test set is chosen as input, and the anchor points and the complete aircraft point cloud are output. Complementary effects such as image 3 shown.
Embodiment 2
[0050] An incomplete aircraft point cloud in the test set is chosen as input, and the anchor points and the complete aircraft point cloud are output. Complementary effects such as Figure 4 shown.
Embodiment 3
[0052] An incomplete aircraft point cloud in the test set is chosen as input, and the anchor points and the complete aircraft point cloud are output. Complementary effects such as Figure 5 shown.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
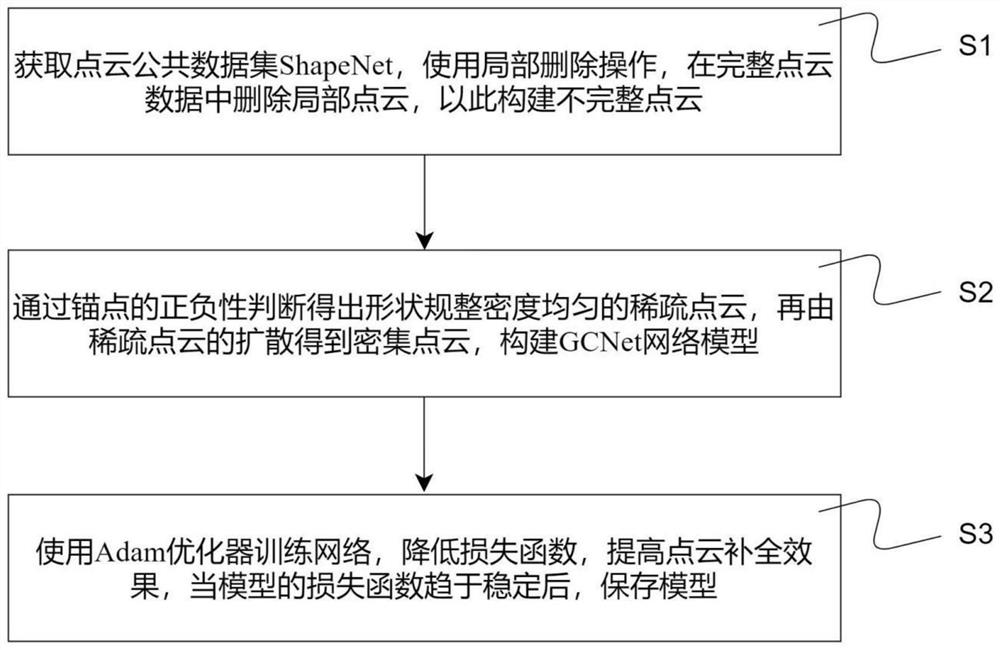
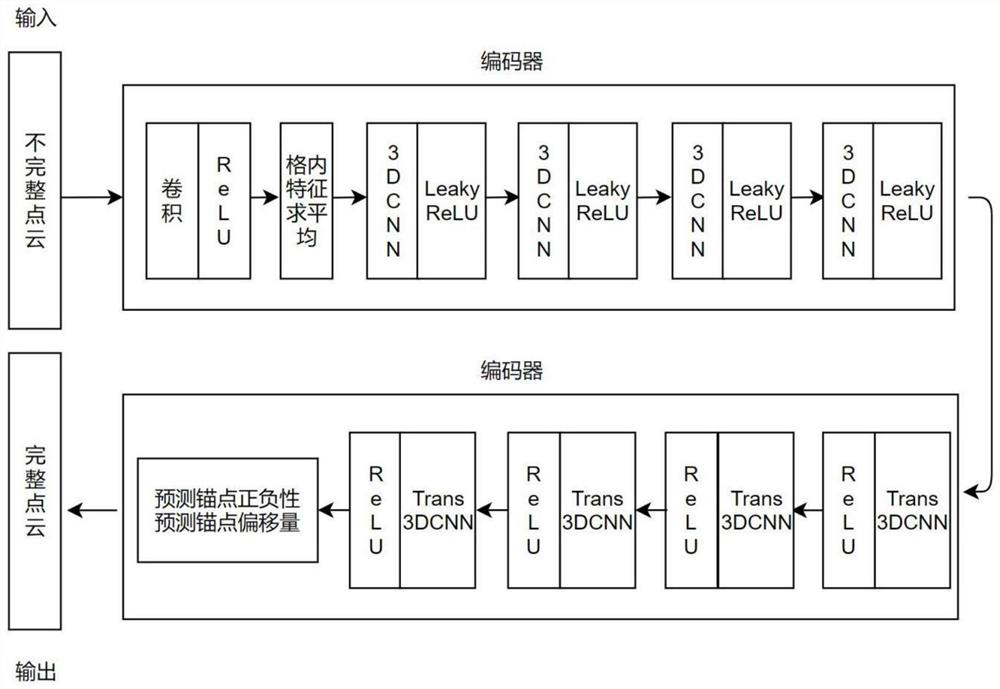
The invention belongs to the technical field of point cloud completion, and relates to an anchor point detection-based point cloud completion method, which comprises the following steps of: firstly, preprocessing a data set by using a local deletion operation so as to simulate an incomplete point cloud; dividing the space where the point cloud is located into a plurality of anchor points, training a neural network to judge the positive and negative characteristics of the anchor points, and obtaining positive sample anchor points with uniform density and regular shape; and finally, dense point clouds are generated in the neighborhood of the positive sample anchor points through a neural network, diffusion from a single anchor point to a local part is realized, and completion of the point clouds is completed. In order to realize the method, a GCNet model matched with the method is trained, the neural network model can judge the positive and negative properties of an anchor point and generate three-dimensional coordinate information of anchor point diffusion, end-to-end point cloud completion is realized, and the problem that the completion effect is poor due to the fact that point cloud coordinates are generated only through neural network regression in an existing method is solved. And the point cloud completion effect is improved.
Description
technical field [0001] The invention belongs to the field of point cloud completion, and in particular relates to a point cloud completion method based on anchor point detection. Background technique [0002] Predicting full 3D point clouds is a core task in many computer vision tasks. [0003] Existing methods are usually based on deep learning to extract global features from incomplete point clouds for restoring complete point clouds. Although they can predict the complete point cloud to a certain extent, they cannot accurately generate the structural details of the object, and there is a problem of uneven density. [0004] Applying deep learning technology to point cloud data is a rising direction in recent years. For the point cloud completion task, the neural network can be trained to achieve the purpose, that is, to input an incomplete point cloud structure and generate a complete point cloud structure. [0005] At present, most network models based on deep learning...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More Patent Type & AuthorityApplications(China)
IPC IPC(8): G06T17/20G06V10/46G06V10/764G06V10/82G06K9/62G06N3/04G06N3/08
Inventor邹艳妮张怡睿徐嘉伯刘小平刘捷
OwnerNANCHANG UNIV