Flexible needle puncture robot
A flexible needle and robot technology, applied in surgical robots, puncture needles, trocars, etc., can solve problems such as inability to flexibly and effectively correct errors, difficult manipulation of flexible needles, affecting puncture stability, accuracy and accessibility. , to achieve the effect of multiple puncture paths, easy puncture, and precise puncture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described below through the specific structures shown in the accompanying drawings. It should be understood, however, that these descriptions are exemplary only, and are not intended to limit the scope of the present invention. Also, in the following description, descriptions of well-known structures and techniques are omitted to avoid unnecessarily obscuring the concepts of the present invention.
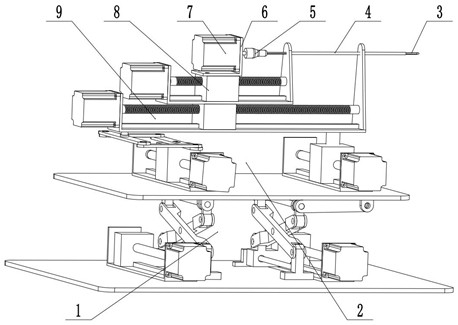
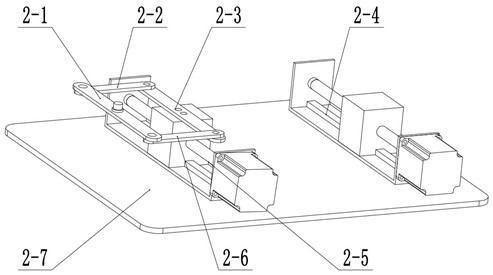
[0017] like Figure 1-Figure 4 As shown, the specific embodiment of the present invention adopts the following technical solutions: a vertical and pitching attitude adjustment mechanism (1), a horizontal and yaw attitude adjustment mechanism (2), a flexible needle (3), a cannula (4), a clamping jaw (5), the auto-transmission motor base (6), the auto-transmission motor (7), the lead screw slide table one (8), the lead screw slide table two (9); ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More