

Quadruped robot object tracking identification method, device and equipment and storage medium
A quadruped robot and recognition method technology, applied in the field of intelligent control, can solve problems such as inability to realize real-time tracking, small tracking area, and inability to track objects, so as to achieve accurate cognition of the object environment, improve speed and efficiency, and apply to complex environments. strong effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
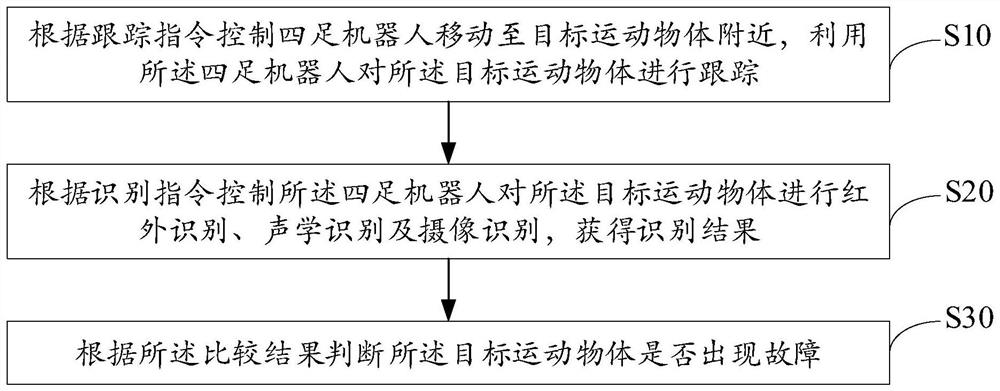
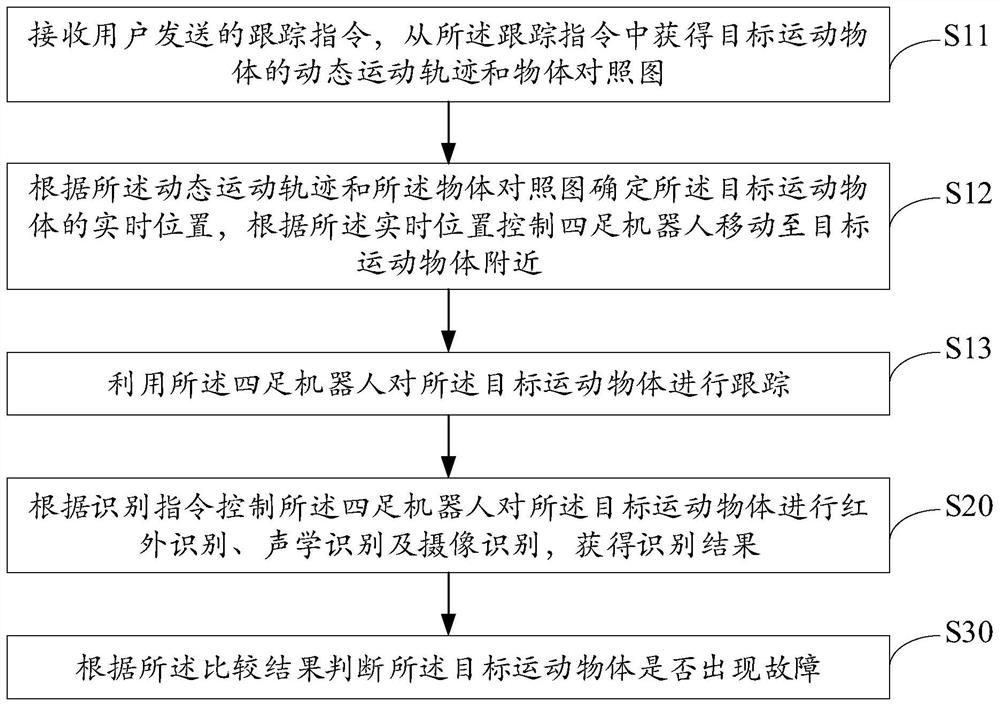
[0050]The solution of the embodiment of the present invention is mainly: control the quadruped robot to move to the vicinity of the target moving object according to the tracking instruction, and use the quadruped robot to track the target moving object; control the quadruped robot to track the target moving object according to the identification instruction; The target moving object is subjected to infrared recognition, acoustic recognition and camera recognition, and the recognition result is obtained; according to the comparison result, it is judged whether the target moving object is faulty, the object can be tracked in real time, and it is suitable for the mobile scene with large changes. Object tracking has strong ability to apply to complex environments, stable operation process, can accurately recognize t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More