

Vehicle track prediction method considering continuous interaction information
A technology of vehicle trajectory and prediction method, which is applied in the field of vehicle trajectory prediction considering continuous interactive information, can solve the problems of poor interpretation of interaction, non-negligible vehicle interaction, and increased difficulty, so as to achieve the effect of accurate vehicle trajectory.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0059] The present invention is described in detail below in conjunction with the accompanying drawings:
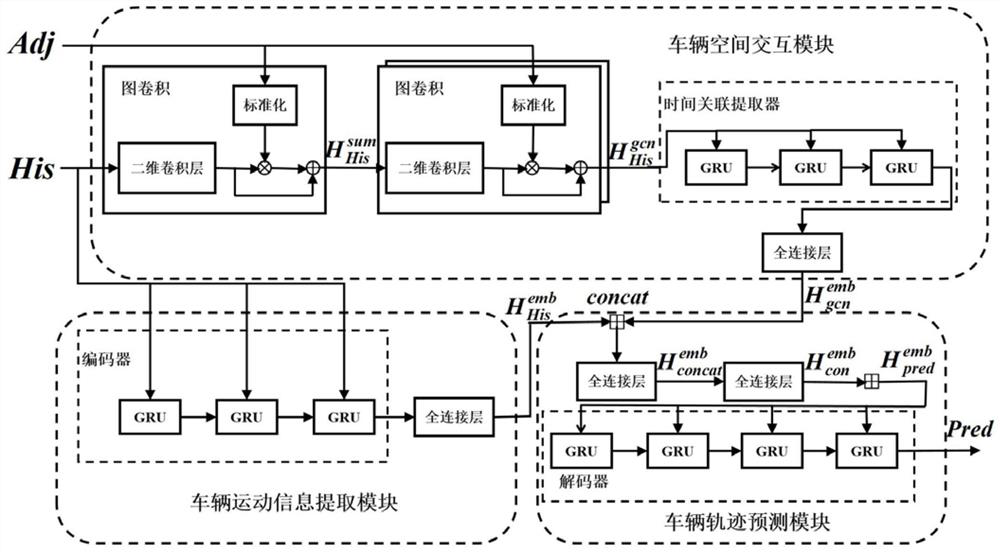
[0060] The present invention proposes a vehicle trajectory prediction method that considers continuous interaction information, fully extracts vehicle motion information and inter-vehicle space interaction information in the vehicle trajectory data set through a network model built, and accurately predicts the future trajectory of the vehicle, such as figure 1 shown, the specific steps are as follows:
[0061] Step 1: Process the vehicle trajectory data set:
[0062] First, the position information of the vehicle in the vehicle trajectory data set is extracted in chronological order, including the horizontal and vertical position coordinates (x, y) of the vehicle; then, the extracted vehicle position information is further processed, and the processing steps include the extraction of trajectory data and the calculation of the adjacency matrix. Construct;
[0063] For th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More