

Method for connecting space object positioned by visible marking points
A technology of space objects and marking points, which is applied to space objects, surgical operations and other detection and positioning occasions. In the field of new marking point positioning, it can solve the problems of restricted accuracy and difficult collinearity, and achieve control error sources, high positioning accuracy, The effect of reducing the amount of error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to better explain the technical solution of the present invention, a further detailed description will be made below in conjunction with the accompanying drawings and embodiments.
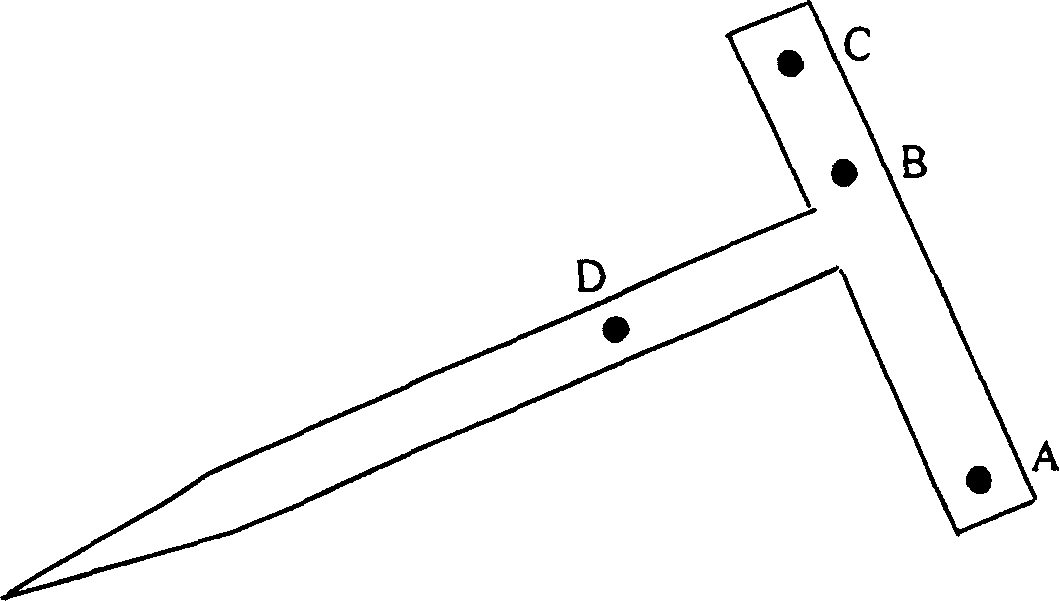
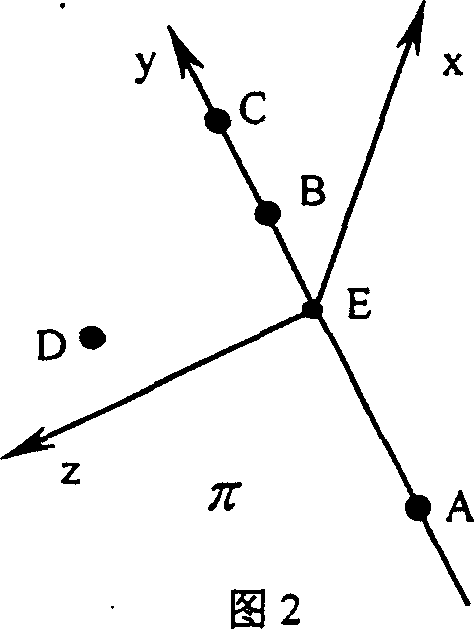
[0019] 1. The probes used in the method of the present invention are as figure 1 shown. The four points A, B, C, and D are the positions of the marker points, and the three points A, B, and C are collinear (it does not need to be strictly implemented). Establish a coordinate system based on the four points A, B, C, and D on the probe, which is called the probe coordinate system. Once a method of establishing a coordinate system is specified, the coordinate system established by four points is unique. Figure 2 is a schematic diagram of establishing the coordinate system of the probe. The plane where A, C, and D are located is recorded as π, and the main optical axis of the camera is required to be outside the plane π. Four marker points are extracted from the image according to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More