

Position information identification device for cleaning robot
A technology for cleaning robots and position information, applied in cleaning machinery, two-dimensional position/channel control, cleaning equipment, etc., can solve the problem of not being able to fully observe the situation of the cleaner
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Hereinafter, preferred embodiments of the present invention will now be described with reference to the drawings.
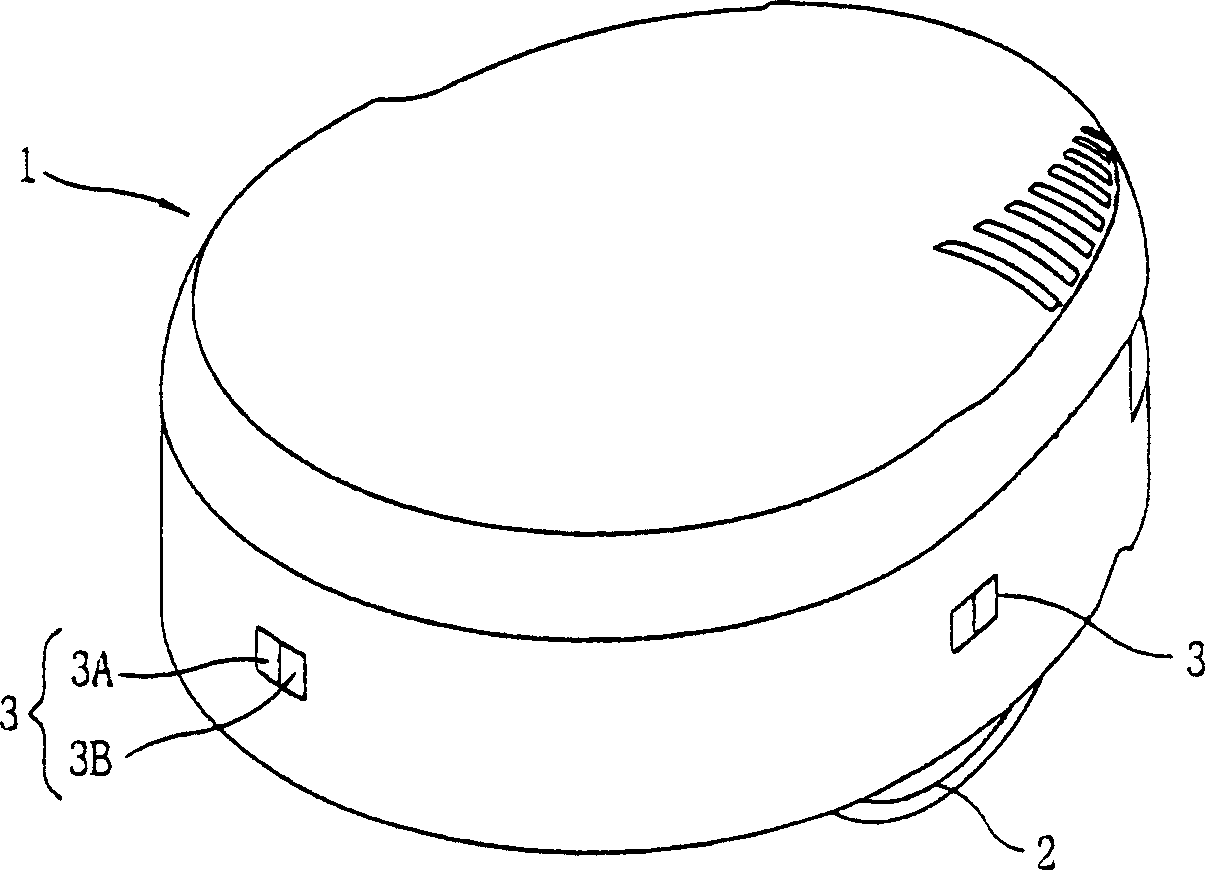
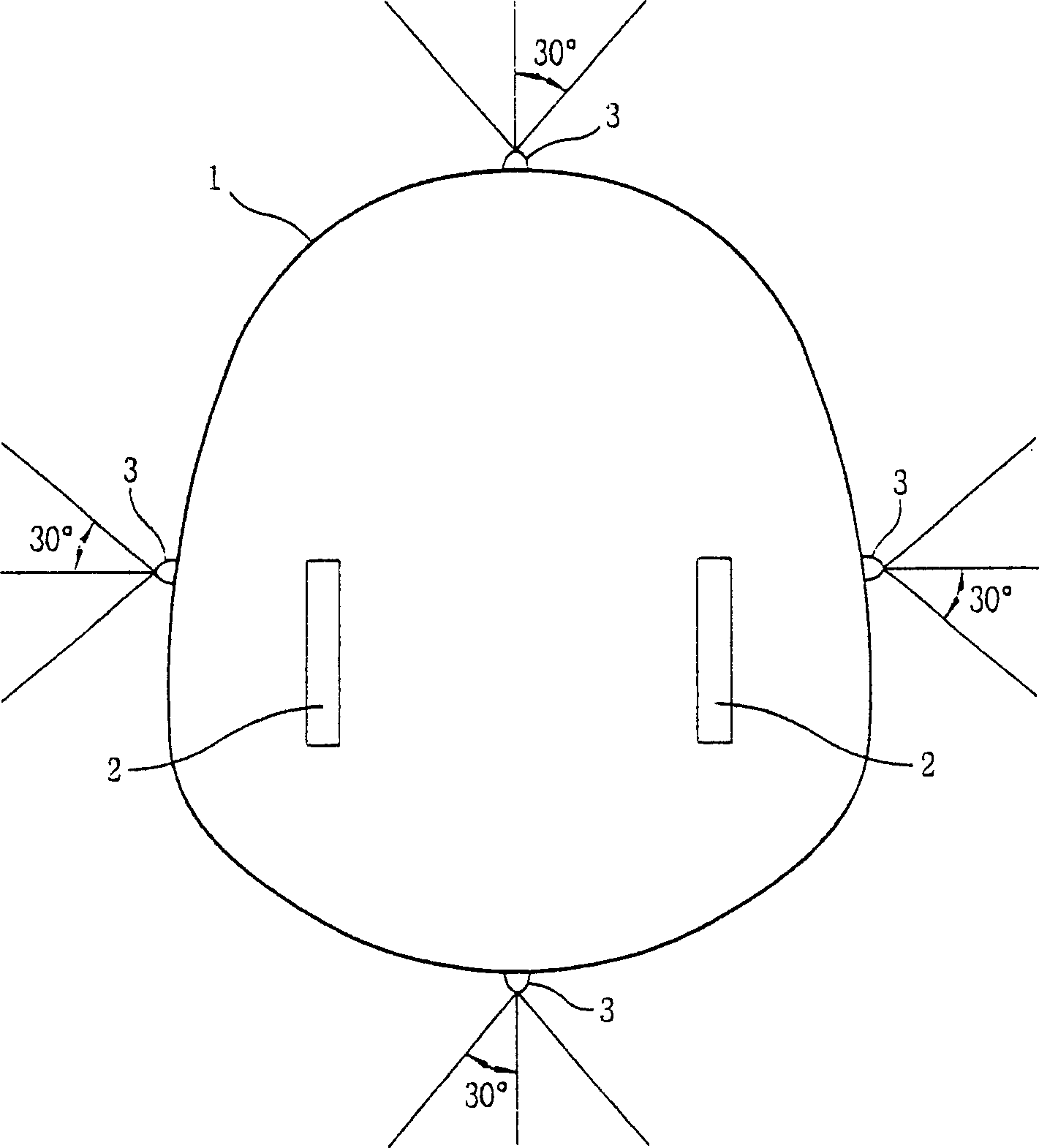
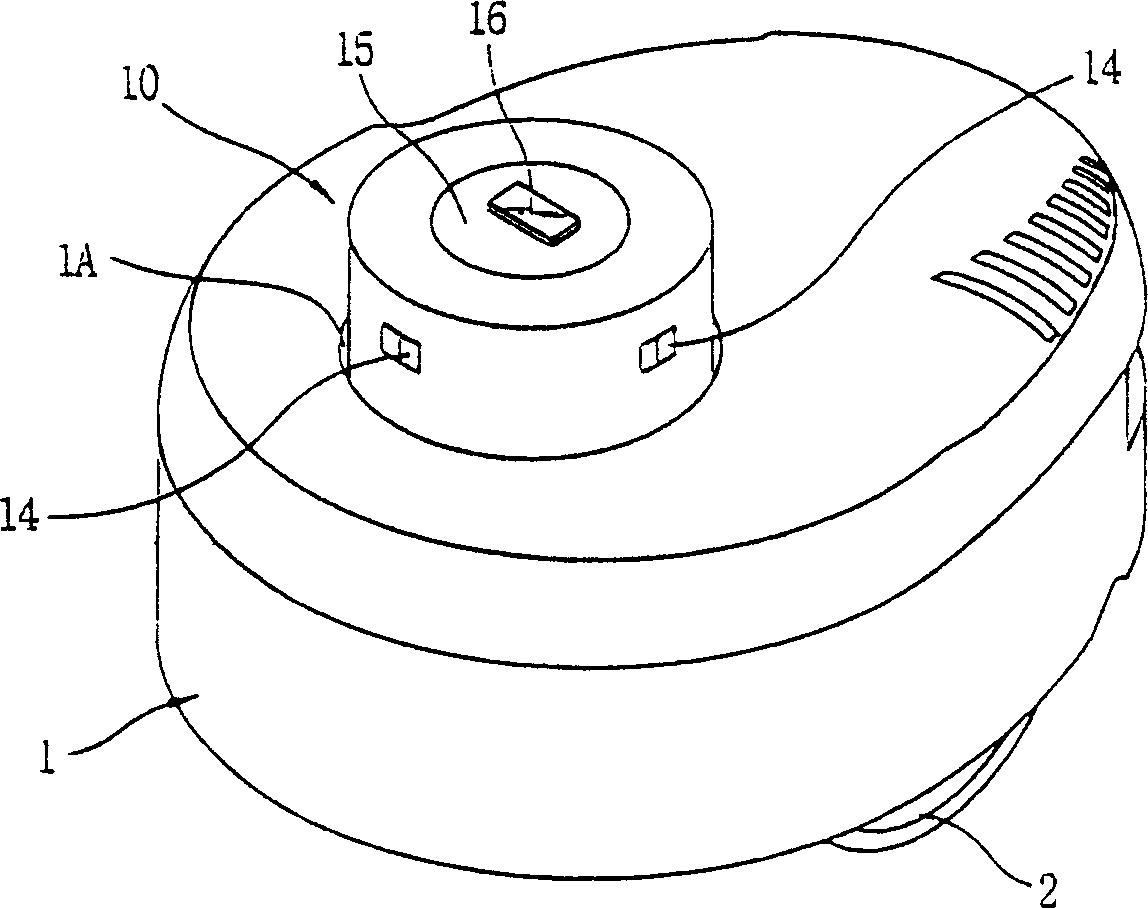
[0023] image 3 Is an external perspective view showing an example of the cleaning robot according to the present invention, Figure 4 Is a vertical sectional view showing the sensor hiding mechanism for moving the sensor assembly up and down according to the present invention, Figure 5 Is an exploded perspective view showing the position recognition device for a cleaning robot according to the present invention, and Figure 6 It is a top view showing the position information recognition device for a cleaning robot according to the present invention.
[0024] Such as Figure 3~6 As shown, the cleaning robot according to the present invention includes a cleaner body 1 having a fan, a motor, a suction pipe, a filter, etc.; a plurality of rotatably installed on the left and right sides of the bottom surface of the cleaner body 1 and move the cleaner The driving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More