

Reduction gear mounted on revolute joint part of industrial robot
An industrial robot and joint connection technology, which is applied in the direction of manipulators, manufacturing tools, mechanical equipment, etc., can solve the problem of the angle selection of the heat release of the front-stage spur gear, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Embodiments of the present invention will be described below with reference to the accompanying drawings.
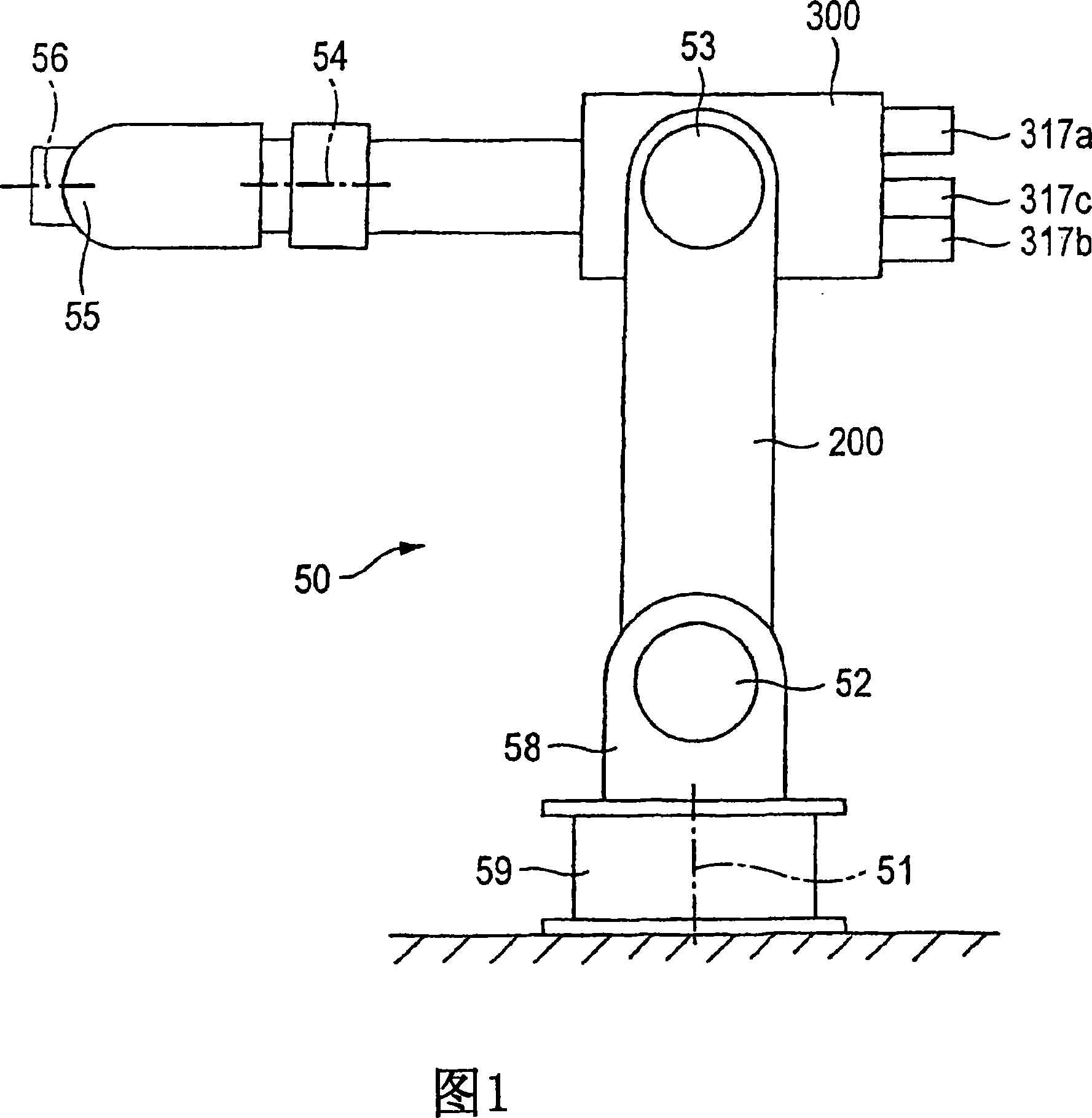
[0029] FIG. 1 is an overall view of an industrial robot 50 . The industrial robot 50 includes a J1-axis articulation part 51, a J2-axis articulation part 52, a J3-axis articulation part 53, a J4-axis articulation part 54, a J5-axis articulation part 55 and a J6-axis articulation part 56. A reducer is attached. There is a base end arm 58 (or swivel head) attached to the base 59 such that the base end arm 58 can rotate on the J1 axis articulation portion 51 . A first arm 200 described later is attached to the base end arm 58 so that the first arm 200 can rotate on the J2-axis articulation portion 52 .
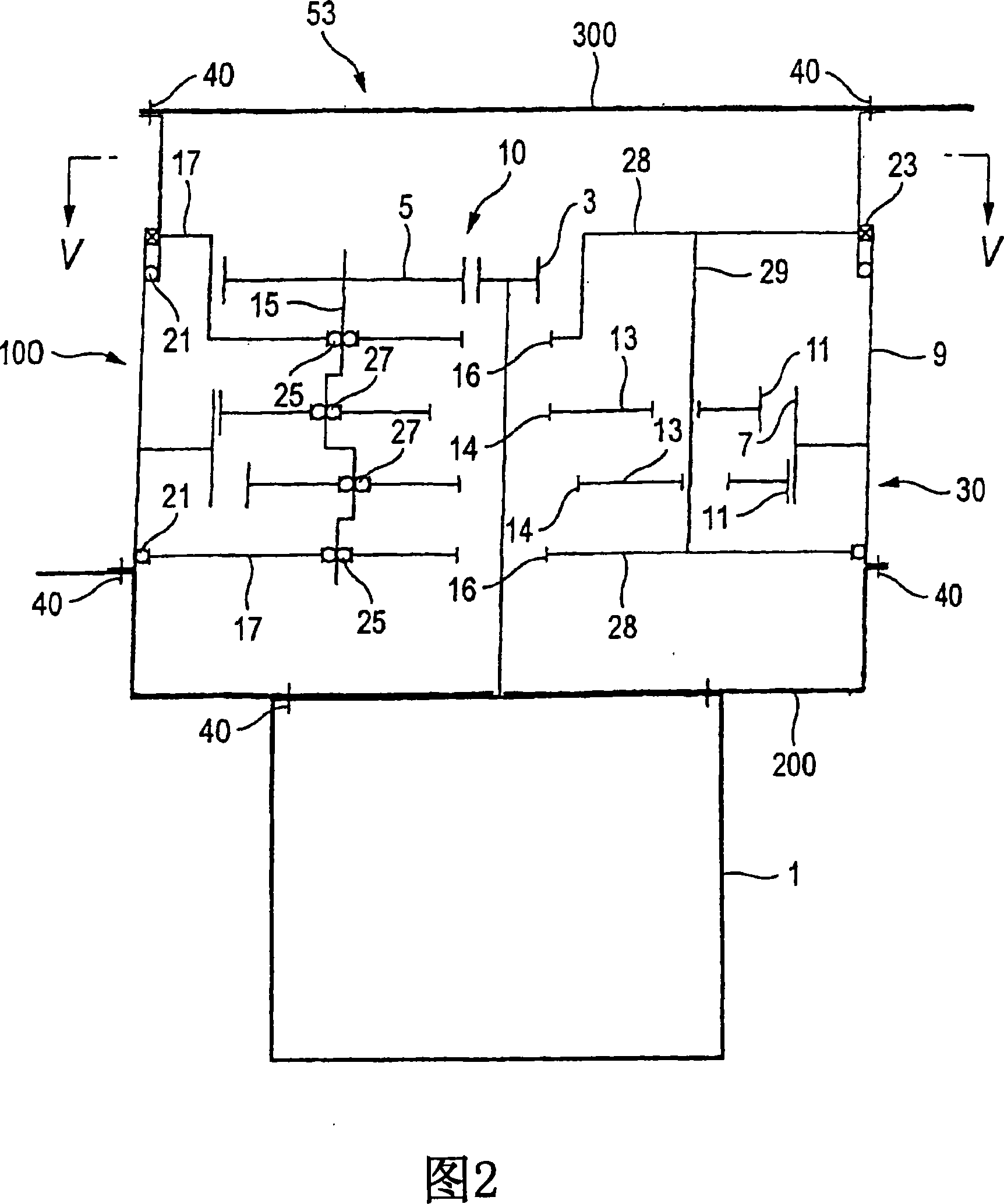
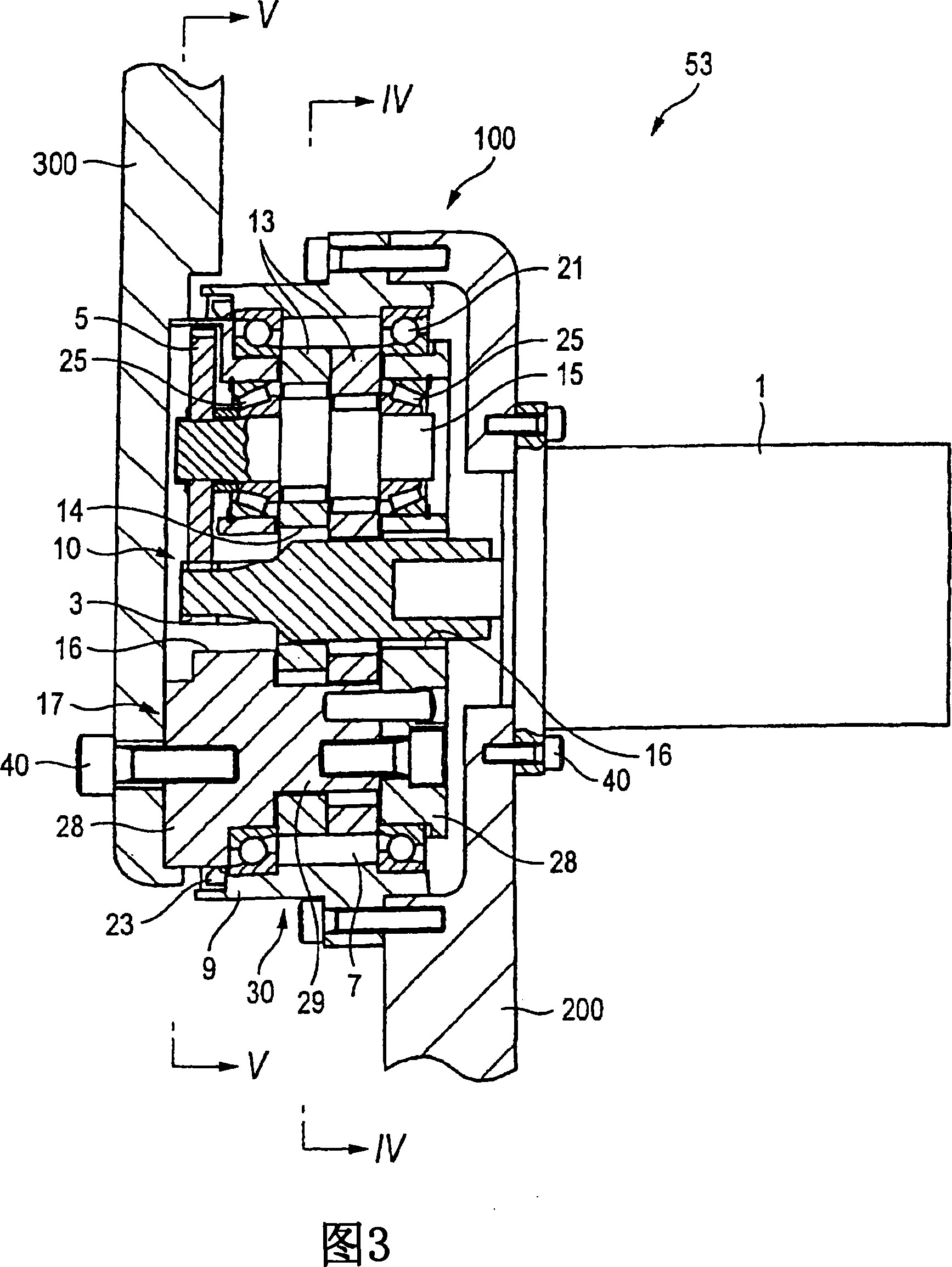
[0030] 2 is a schematic diagram showing a sectional structure of a speed reducer attached to a J3-axis articulation portion of an industrial robot according to a first embodiment of the present invention. FIG. 3 is a view showing the view shown in FIG. 2 with a sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More