

Method for tracing arm motion in real time video tracking system
A tracking system and real-time video technology, applied in the input/output of user/computer interaction, image data processing, instruments, etc., can solve the problems of restricting promotion and application, expensive price, and interference of target electromagnetic field electromechanical equipment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
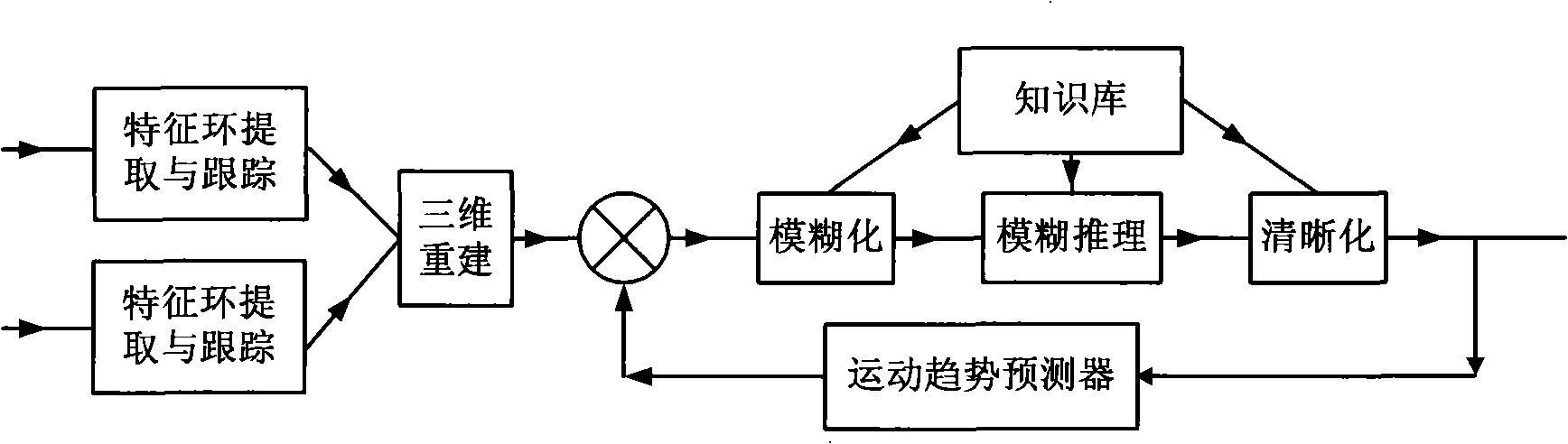
[0034] This embodiment provides a complete set of arm motion tracking solution, which mainly includes the following three parts:
[0035] 1. Feature extraction of arm identification ring
[0036] 1) Camera geometry calibration. In the offline state, several checkerboard calibration board images with depth information and checkerboard calibration paper images tiled on the ground were taken by two cameras, and then used MatlabTM The extended toolbox of camera calibration realizes geometric calibration and obtains the internal and external parameters of two cameras.
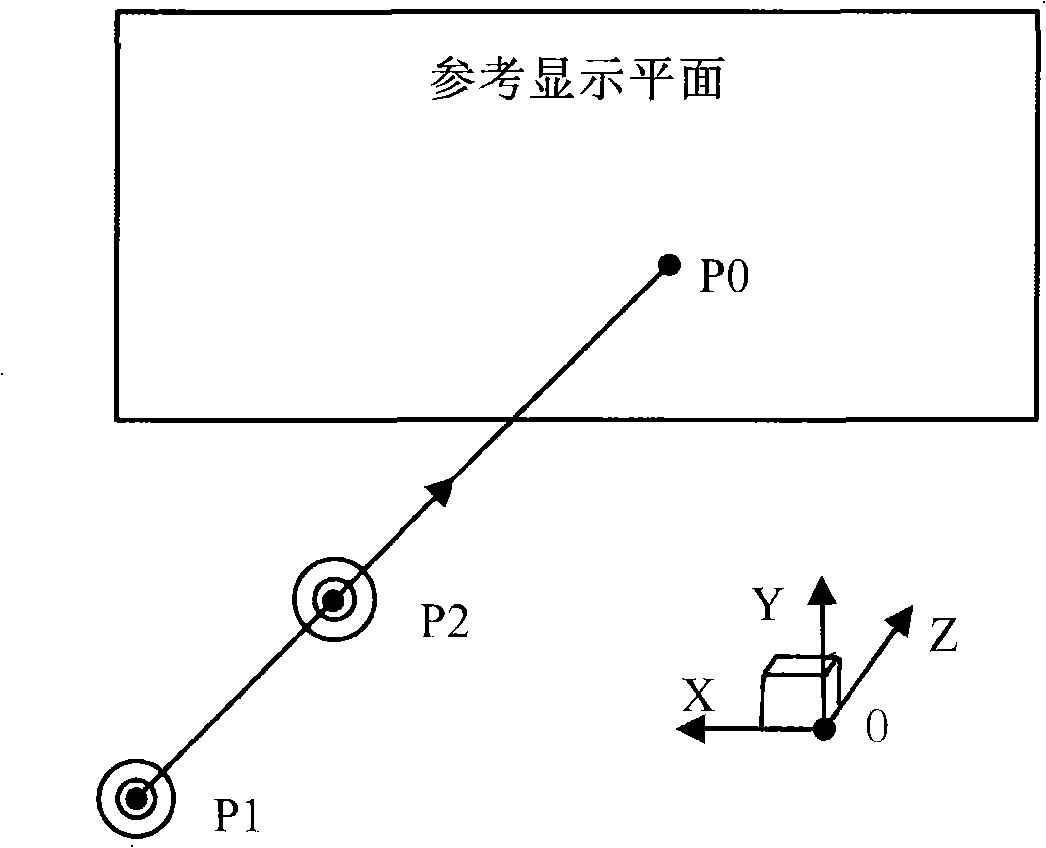
[0037] 2) Extract the edge feature points of the logo ring. According to the coherence of arm motion, coarse target search windows are separately separated from the interactive images from the two cameras in order to improve the efficiency of feature extraction. Then using the known color features of the logo rings, the edge point sequences corresponding to the wrist and elbow logo rings are extracted respectively...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More