

Electric power circuit detection method by polling flying robot
A technology of flying robots and power lines, applied to aircraft, rotorcraft, motor vehicles, etc., can solve the problems of not considering the generation of flight trajectories, low intelligence level, and unoptimized search results, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
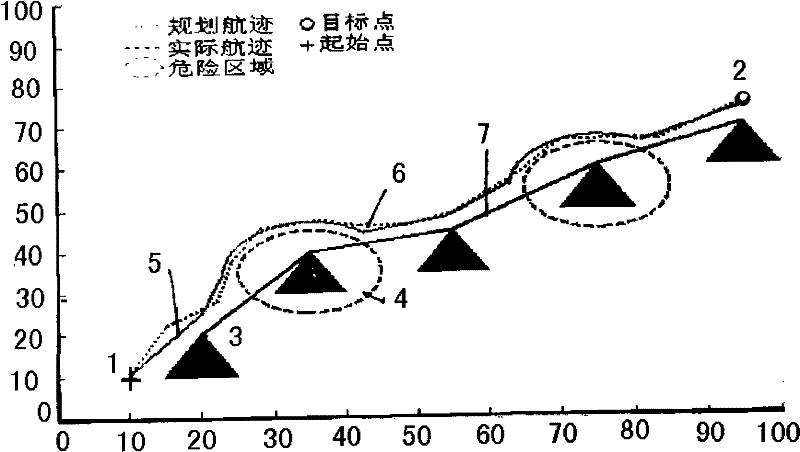
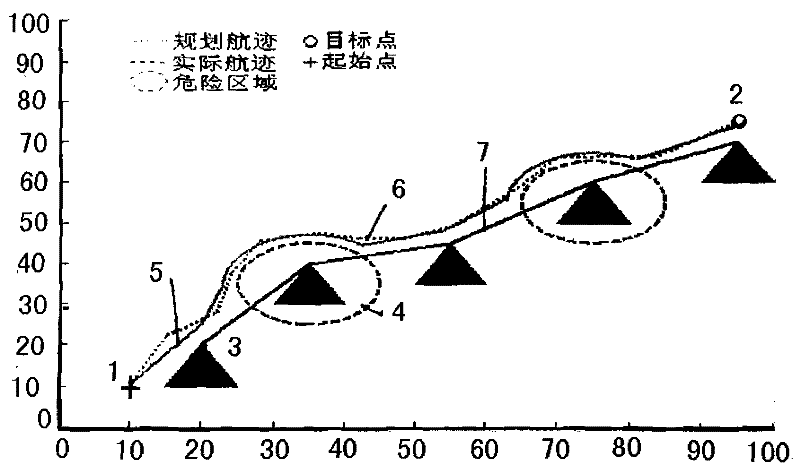
[0040] The invention provides a method for detecting a power line by an inspection flying robot. In this method, a micro-helicopter is used as a carrier. figure 1 The two-dimensional simulation model of the detection of the power line by the inspection flying robot is shown. In the figure, the power line 7 is divided into n sections from the starting point 1 to the target point 2, and each section is equipped with a support tower 3, and there is a dangerous area 4 in the middle of the line. , the flying robot starts from the starting point 1 and flies along the actual track 5. The camera equipment used along the way detects the power lines in sections and obtains image information. During each section of the flight, the flying robot must always keep in touch with the ground control system real-time communication.
[0041] In the inspection flying robot, according to the inspection two-dimensional simulation model, the planned track 6 is designed to inspect the power line. Fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More