

Method for on-line self-calibration of external parameters of cameras of bionic landing system of unmanned gyroplane
A technology of unmanned rotorcraft and landing system, applied in the field of camera external parameter self-calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
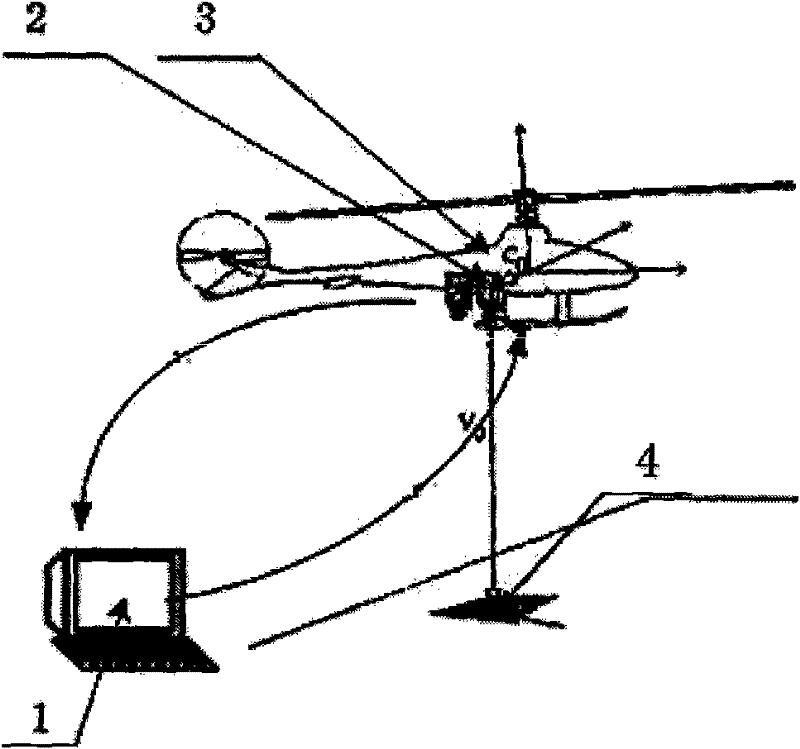
[0075] A preferred embodiment of the present invention is described in detail as follows in conjunction with accompanying drawing: See image 3 , the whole system adopted by the camera off-line parameter self-calibration method of the unmanned rotorcraft bionic landing system, including the ground control system 1 (PC machine), the airborne control system 2, the unmanned rotorcraft 3 and the landing target 4. Among them, the model selected for the airborne camera is Canon VC-C50iR, with a variable focal length.
[0076] see Figure 4 , the self-calibration method of the camera's off-line and off-line parameters of the bionic landing system of the unmanned rotorcraft, the operation steps adopted are as follows:
[0077] (1) Internal parameter calibration (internal parameter calibration 1):
[0078] ① Take the calibration image, the spatial point distribution of the calibration image must conform to Figure 5 shown.
[0079] ② Substitute the image coordinates into the intern...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More