

Method for planning path for mobile robot based on environmental modeling and self-adapting window
An adaptive window, mobile robot technology, applied in the direction of instruments, road network navigators, special data processing applications, etc., can solve problems such as large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0080] 1) Multi-constraint local environment modeling and analysis
[0081] The robot uses the laser sensor to perceive the information of the obstacle. The position of each obstacle detection point relative to the robot can be directly obtained by the laser sensor. The angular scanning interval is Mark the laser scanning points counterclockwise as where l i at scan angle and the corresponding measuring distance d i to represent, that is, the polar coordinate form
[0082]
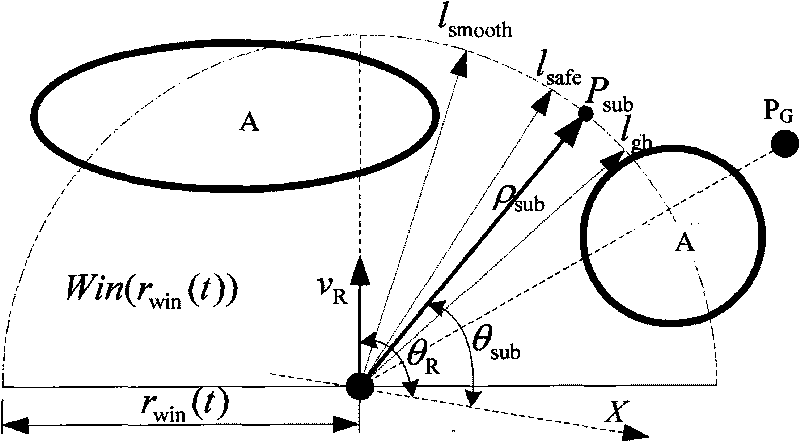
[0083] According to the local environment information detected by the above sensor scanning, design a dynamic adaptive planning window, whose radius r win It can be dynamically adjusted according to the environmental information, and the local environmental information detected within the ranging range at time t can be dynamically adjusted at a radius of r win In the semicircular window of , it is expressed as Win(r win (t))={l 1 , l 2 ,..., l i ,...,l 181}, where the scan point l i is red...
Embodiment 2
[0140] The present invention is based on environment modeling and self-adaptive window mobile robot path planning method, the behavior decision and execution process in its path planning are as follows:
[0141] 1) For the system parameter r win 、k gh 、k safe 、k smooth 、k FD , Δr min , Δr max 、D leave , L max1 , L max2 For initialization, the robot defaults to MtG behavior when it first starts.
[0142] 2) Read the sensor data, express it in the form of formula (1), and then use formula (2) for l i to redefine.
[0143] 3) Expand the boundary of obstacle A, and use formulas (3) to (6) to calculate Win(r win (t)) in l i The traversability, safety, motion smoothness, and target attractiveness functions of .
[0144] 4) Determine what kind of behavior the robot is currently in. If it is the behavior towards the target, go to Step 5, otherwise go to Step 6.
[0145] 5) Move toward the target (Motion toward Goal, MtG) (i.e. 5.1~5.3), until one of the following condi...
Embodiment 3
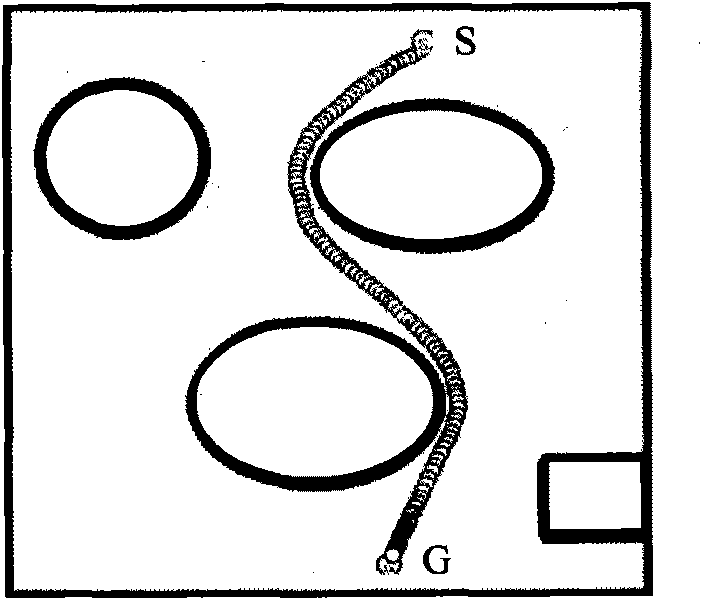
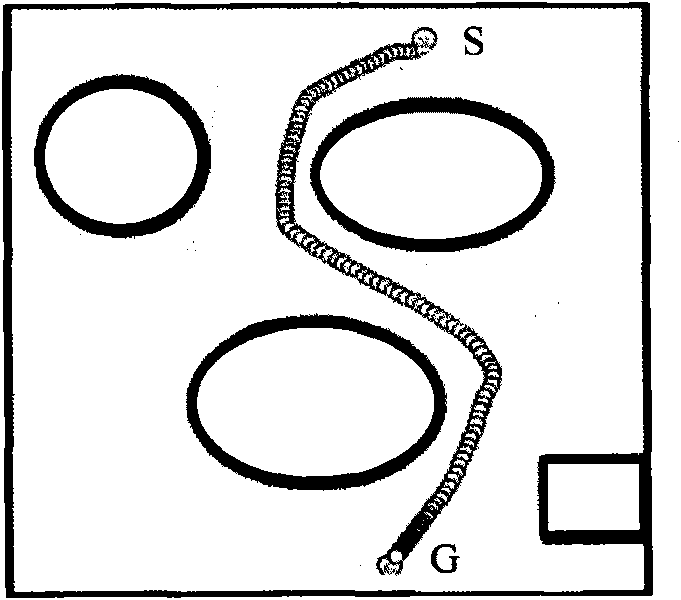
[0159] In order to verify the influence of various factors in the multi-constraint environment model on path planning, Figure 2-4 The result of path planning in a simple environment is given. in, figure 2 for k gg = 1,k safe =k smooth The path when = 0 only considers the traversability, so although the path is the shortest, the distance from the obstacle is the shortest, which is not conducive to the safe driving of the robot; image 3 for k gg =0.70,k safe =0.30,k smooth = 0, considering the security, and figure 2 Compared with the safety is significantly improved (the path is far away from obstacles); Figure 4 for k gg =0.55,k dafe =0.20,k smooth =0.25, the motion stability is further considered, which is beneficial to reduce the steering operation of the robot.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More