

Bionic hopping robot with two degrees of freedom
A robot and degree-of-freedom technology, used in motor vehicles, transportation, and packaging, and can solve problems such as unsatisfactory airframe stability and inability to adjust the takeoff angle.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
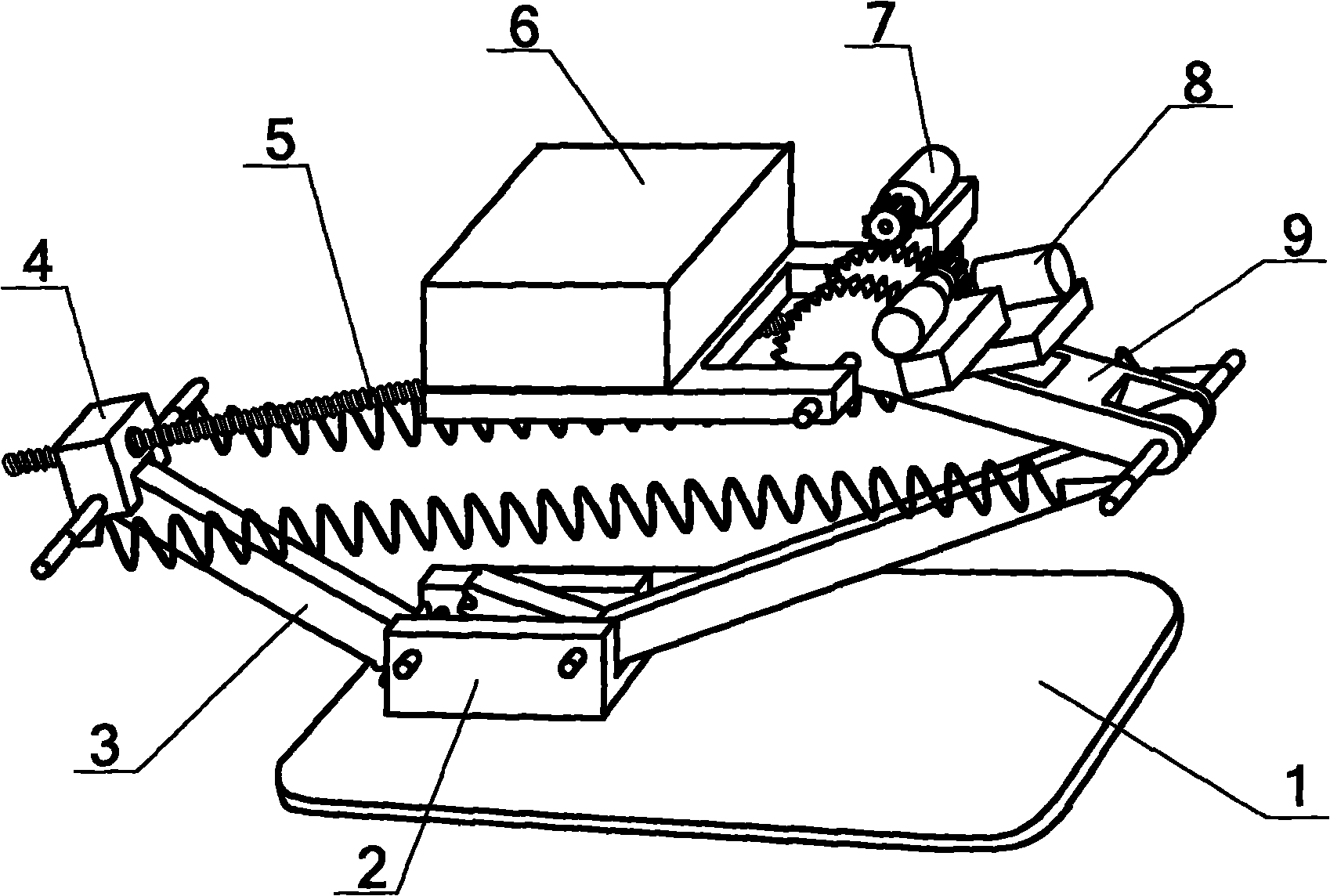
[0026] figure 1 The structure of the bionic bouncing robot with two degrees of freedom of the present invention is shown, which includes a body device, a leg device and a foot sole device.
[0027] The fuselage device is composed of the fuselage 6, the fuselage bracket 37 and the fuselage posture adjustment mechanism; the leg device is formed by overlapping the lead screw nut mechanism, the leg posture adjustment mechanism, the rod and the spring 14. It is connected with the fuselage device, and the bottom end is connected with the foot sole device;
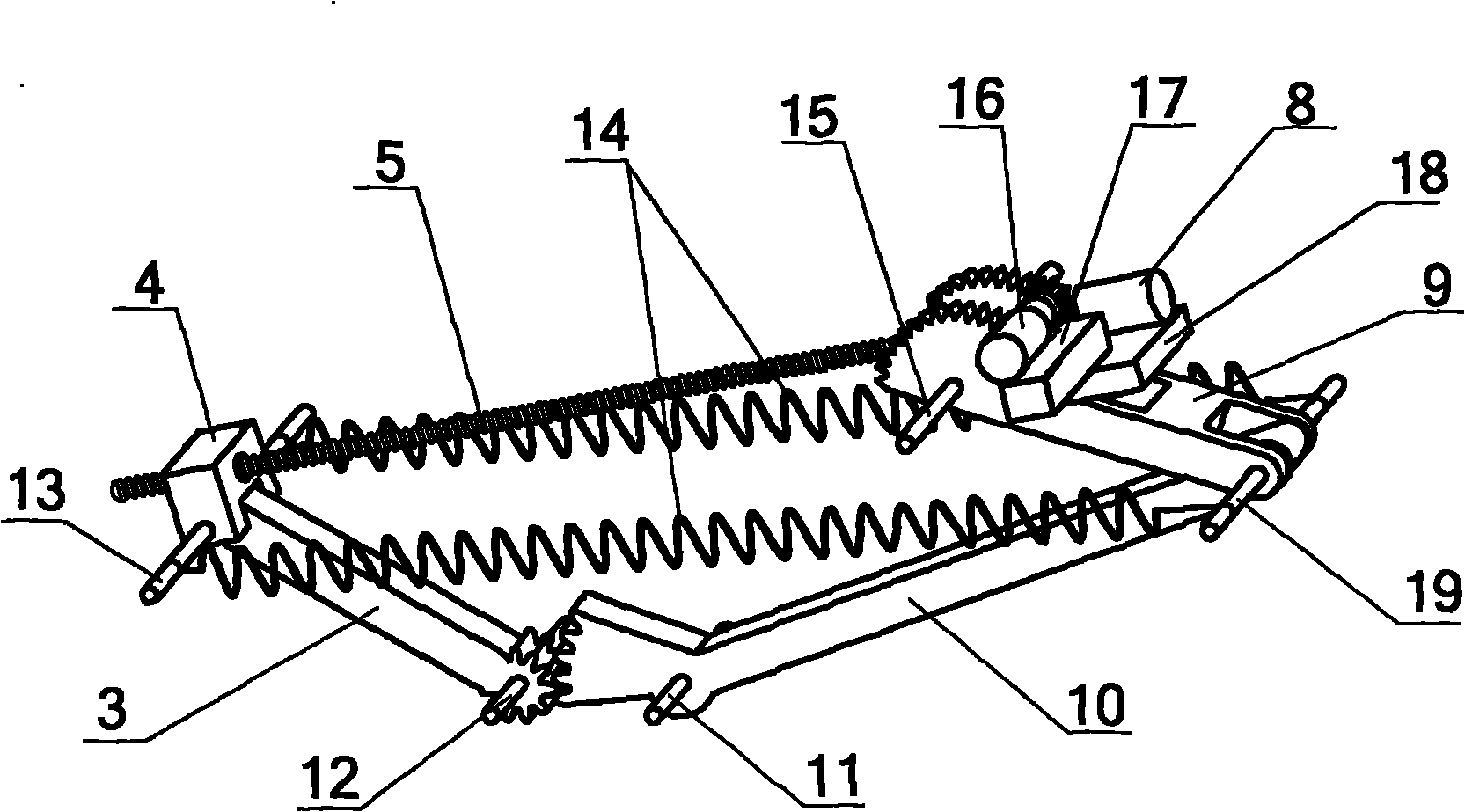
[0028] like figure 2 As shown, the leg device adopts a gear five-bar structure with variable rod length, including a thigh rod 9, a calf rod 10, an auxiliary rod 3, a lead screw nut mechanism, a leg posture adjustment mechanism, a spring 14 and five thin rods. Long and smooth joint shafts, wherein the five joint shafts are hip joint shaft 15 , knee joint shaft 19 , ankle joint shaft 11 , auxiliary ankle joint shaft 12 and auxi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More