

Frog jumping simulating robot based on fire blast driving and method
A robot and explosive technology, applied in the field of robotics, can solve the problems of heavy weight, large size, and difficulty in realizing the flexible jumping ability of a frog-like robot, and achieve the effect of simple structure and easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
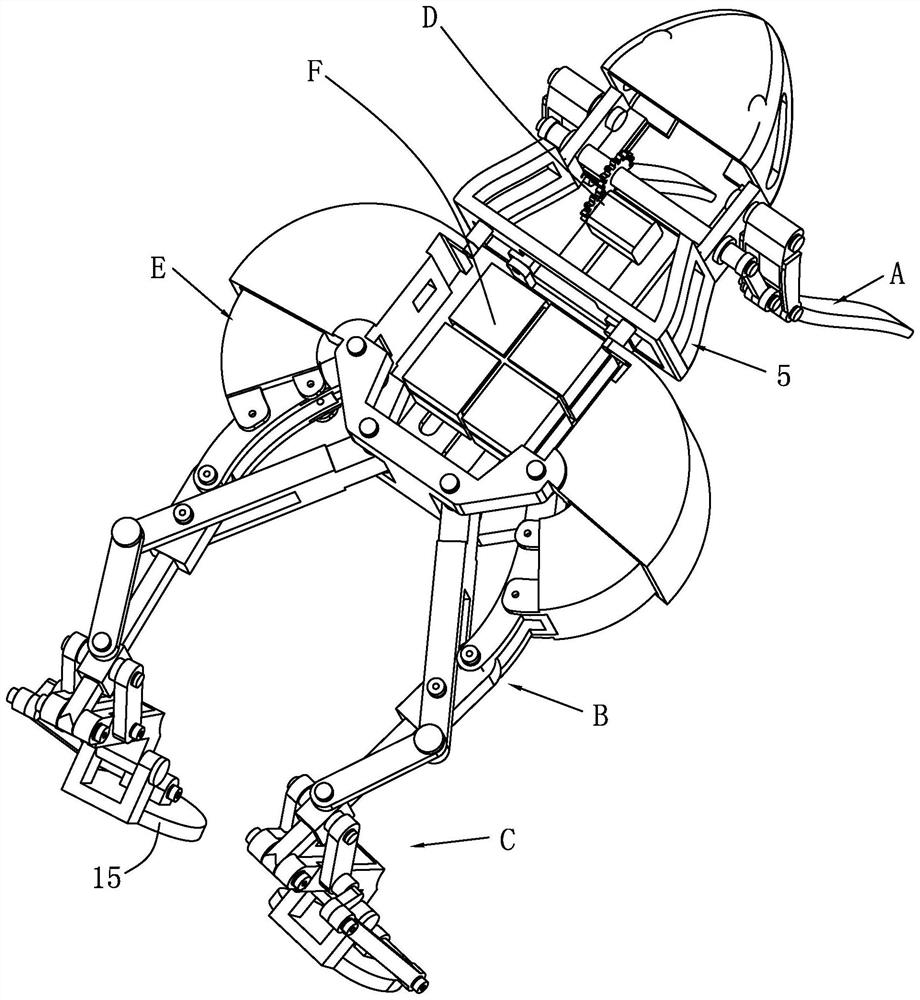
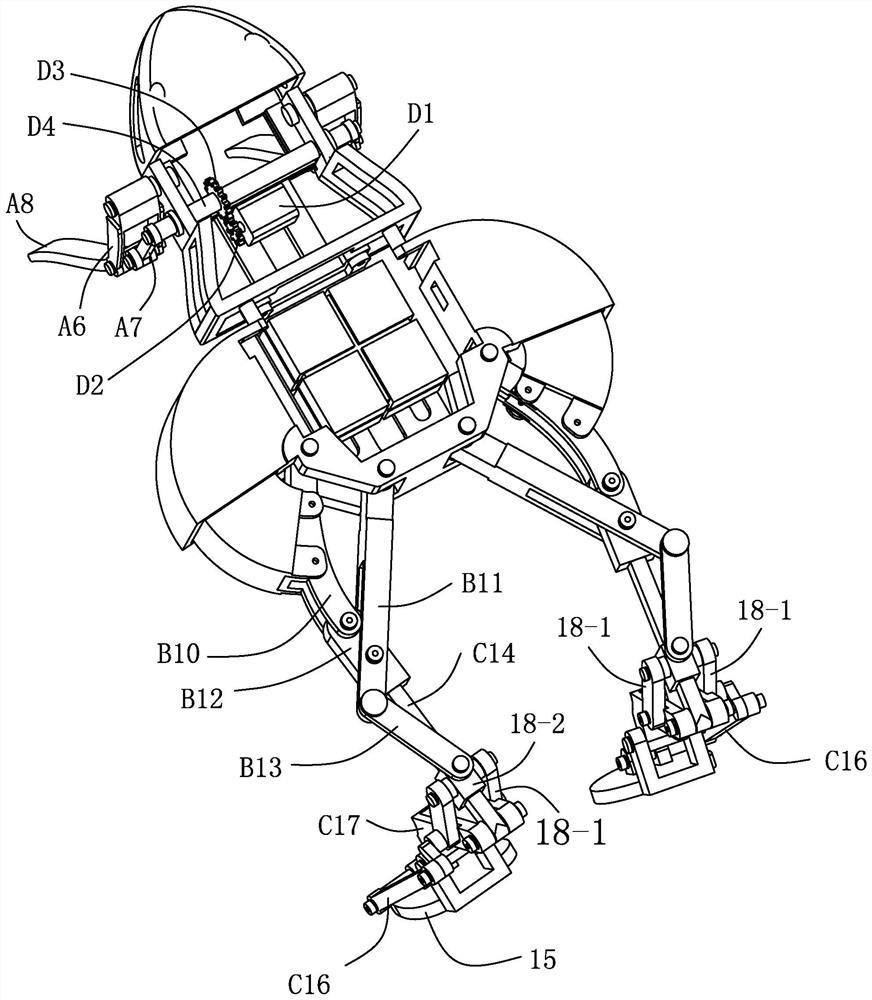
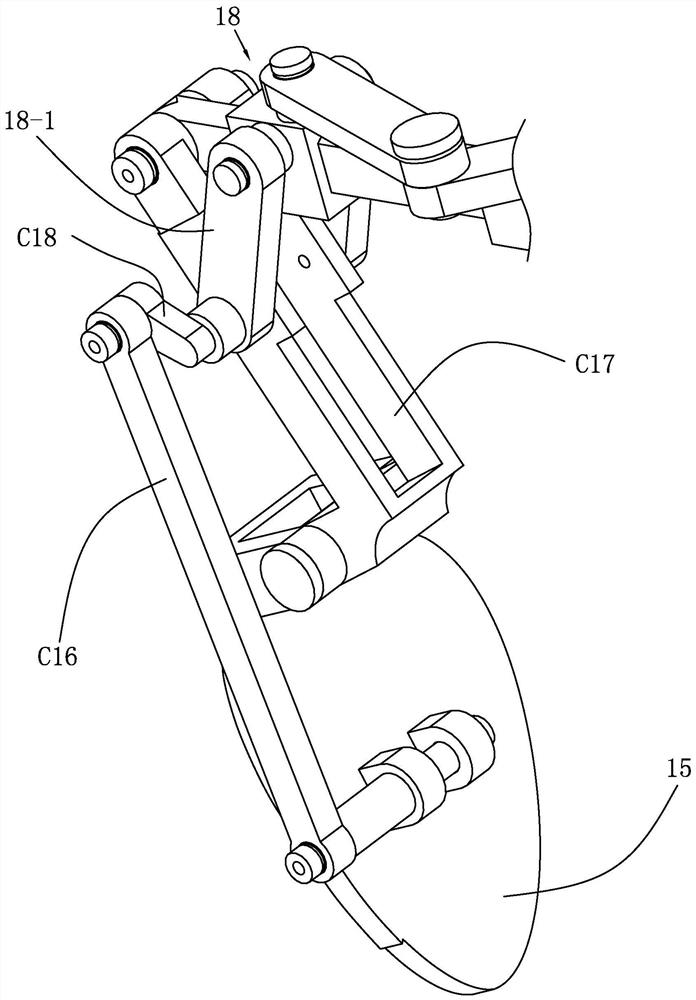
[0016] see Figure 1-Figure 3 As shown, a jumping robot imitating a frog based on explosive driving includes a main body trunk 5, two forelimbs A, and two hind limbs, each of which includes a thigh B, a calf C and flippers 15, and the main body trunk 5 and the thigh B Rotation connection, thigh B is rotationally connected with calf C, calf C is rotationally connected with fins 15, and each forelimb A is rotatably arranged at the front end of main body trunk 5; it also includes ignition and detonation system E and main controller F, and forelimb A is composed of The forelimb power mechanism D arranged on the main body trunk 5 is driven to adjust the jumping posture. The forelimb power mechanism D is controlled by the main controller F arranged on the main body trunk 5, and the ignition and explosion system is controlled by the main controller F to control the gas injection. and gas explosion, the hind limbs are driven and stretched by the ignition and explosion system E arrange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More