Method for removing polygonal obstacle for ground mobile robot group
A mobile robot and mobile machine technology, applied in the direction of instruments, non-electric variable control, position/direction control, etc., can solve the problem of not paying attention to group cooperation, not considering the problem of formation maintenance, and not being able to adapt to the requirements of large-scale robot groups and other problems, to achieve an orderly get rid of and improve the effect of mutual collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] In order to make the method and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
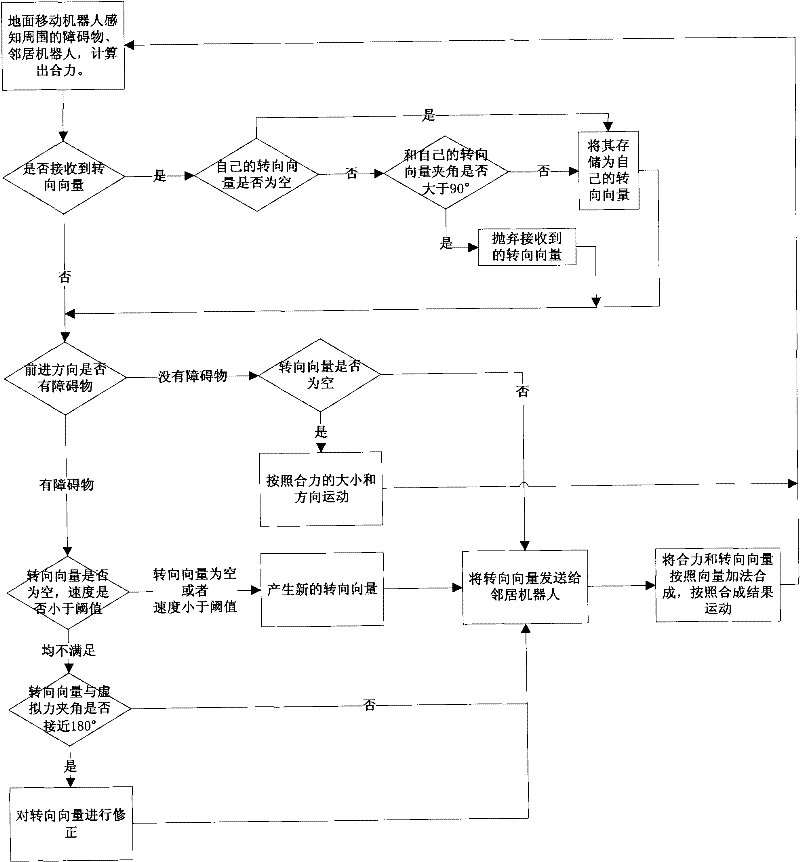
[0018] The method involved in the present invention mainly consists of three steps: generation of steering vector, transmission of steering vector and generation of motion direction.
[0019] Step 1: Generation of Steering Vectors
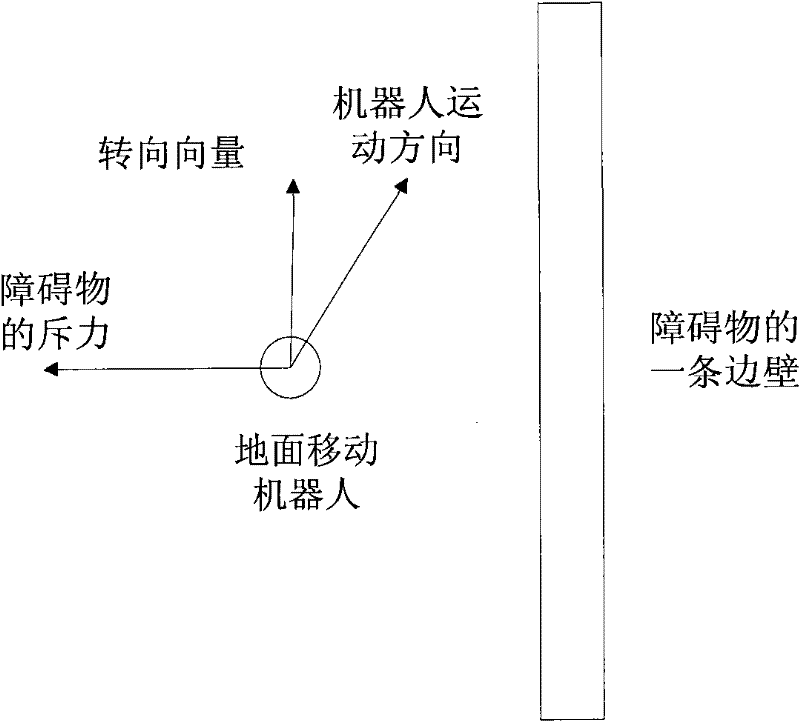
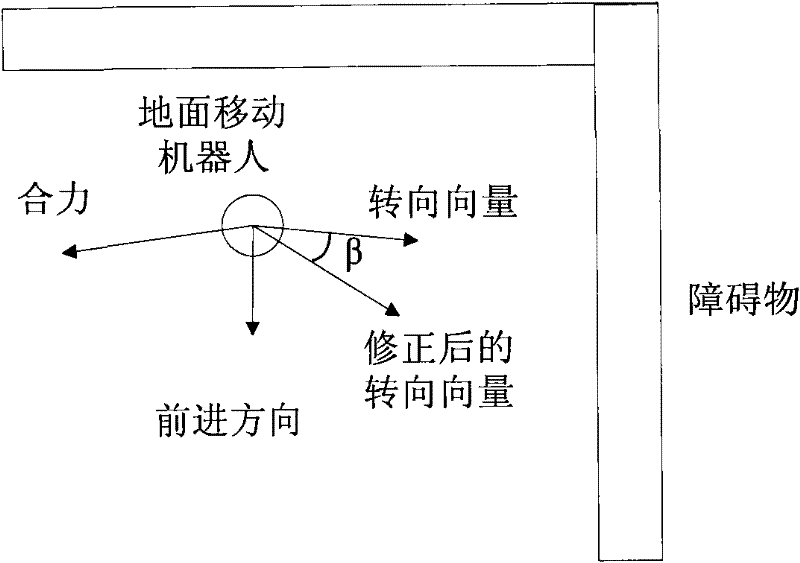
[0020] When the ground mobile robot group moves towards the target point in a certain formation, it obtains the position information of all neighbor robots through communication, and then detects whether there are obstacles around. If there is an obstacle, its distance and position are calculated. According to the position and distance of the obstacle, the repulsive force of the obstacle it receives is obtained. At the same time, the ground robot obtains the resultant force of the mobile robot according to the location information of the neighbor robot,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com