

Method for calibrating parameters in camera through solving circular ring points by utilizing regular tetrahedron
A technique of regular tetrahedron and ring point, applied in the field of camera calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
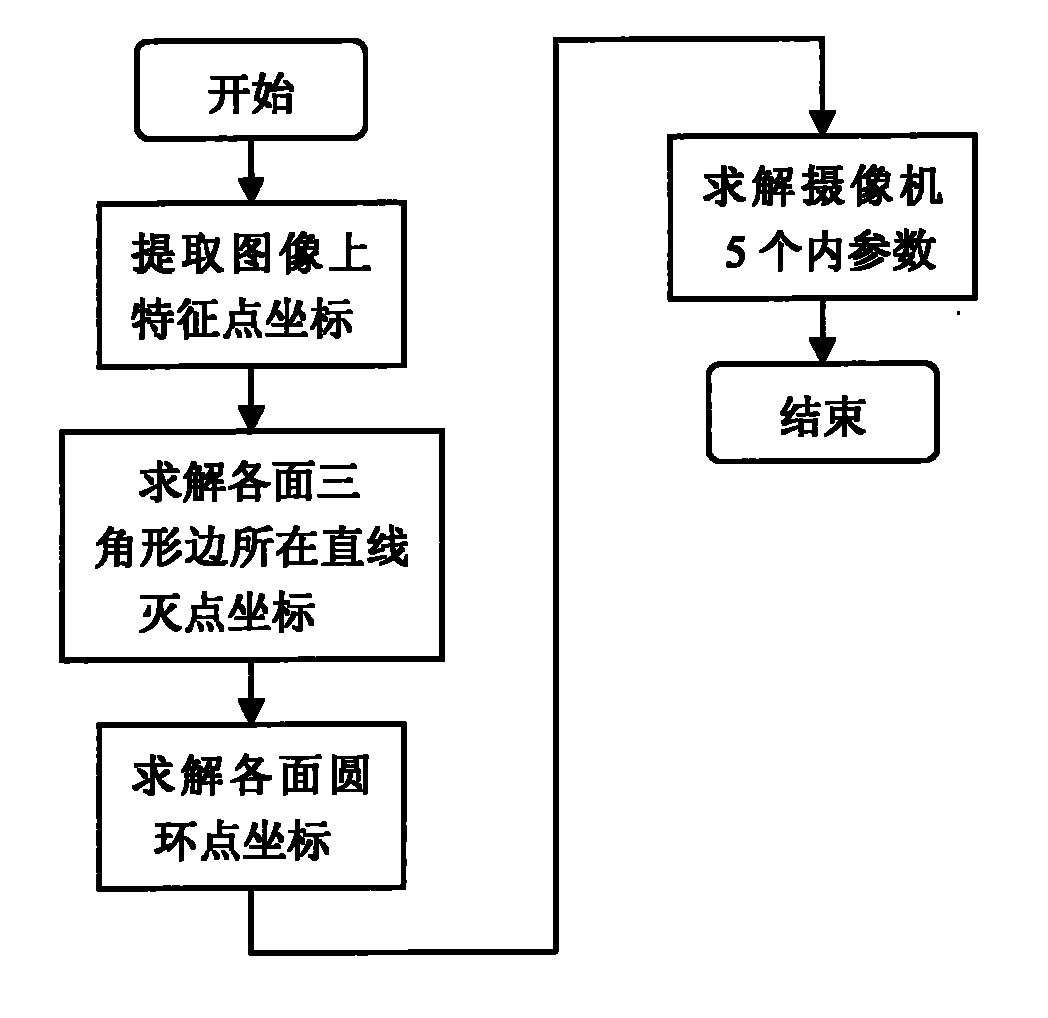
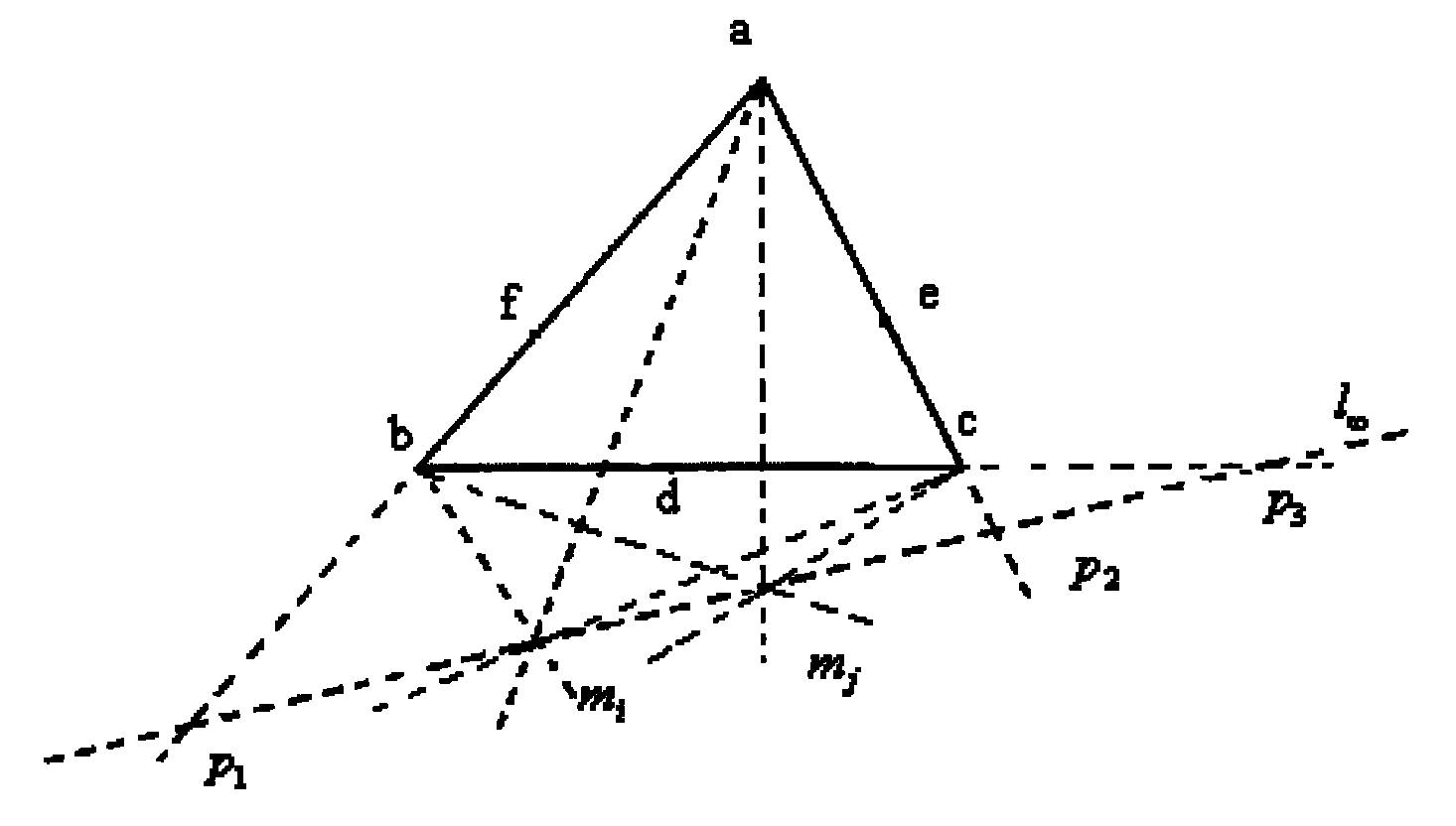
[0049] The present invention proposes a method for solving the parameters of the camera by using a space regular tetrahedron target. figure 1 As shown, the principle of triangular imaging image and solving plane ring point image coordinates is as follows figure 2 Shown.
[0050] The following uses an example to describe the implementation of the present invention in more detail:
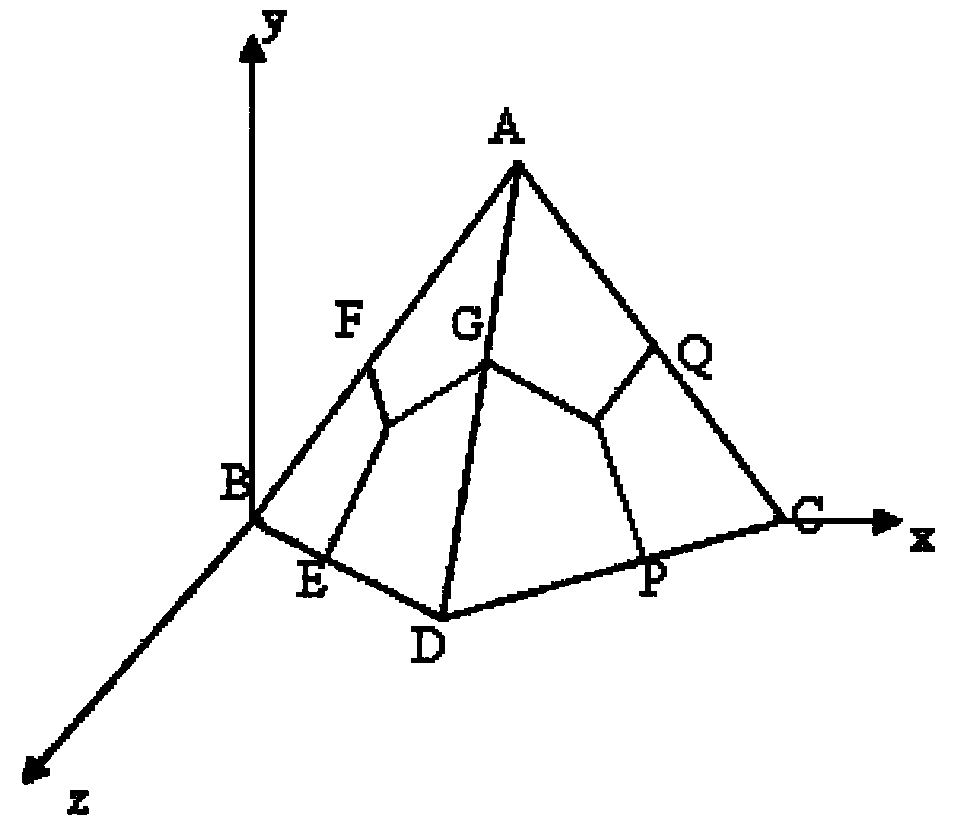
[0051] The tetrahedral target used for calibration is a regular tetrahedron with arbitrary edge length, such as image 3 Shown. In the example of the present invention, the edge length of the tetrahedron is set to 30cm, the point B is taken as the origin of the coordinate system, and the straight line where BC is located and the straight line perpendicular to each other are taken as the x-axis and the z-axis on the plane where the triangle BCD is located. The planes are perpendicular to each other and the straight line is the y-axis, and the right-hand rectangular coordinate system B-xyz is established,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More