

Traveling aid device
A technology of driving support and control devices, which is applied in the directions of automatic starting devices, braking action starting devices, transportation and packaging, etc., which can solve the problems of driver discomfort and inability to avoid obstacles, and achieve the effect of reducing discomfort
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
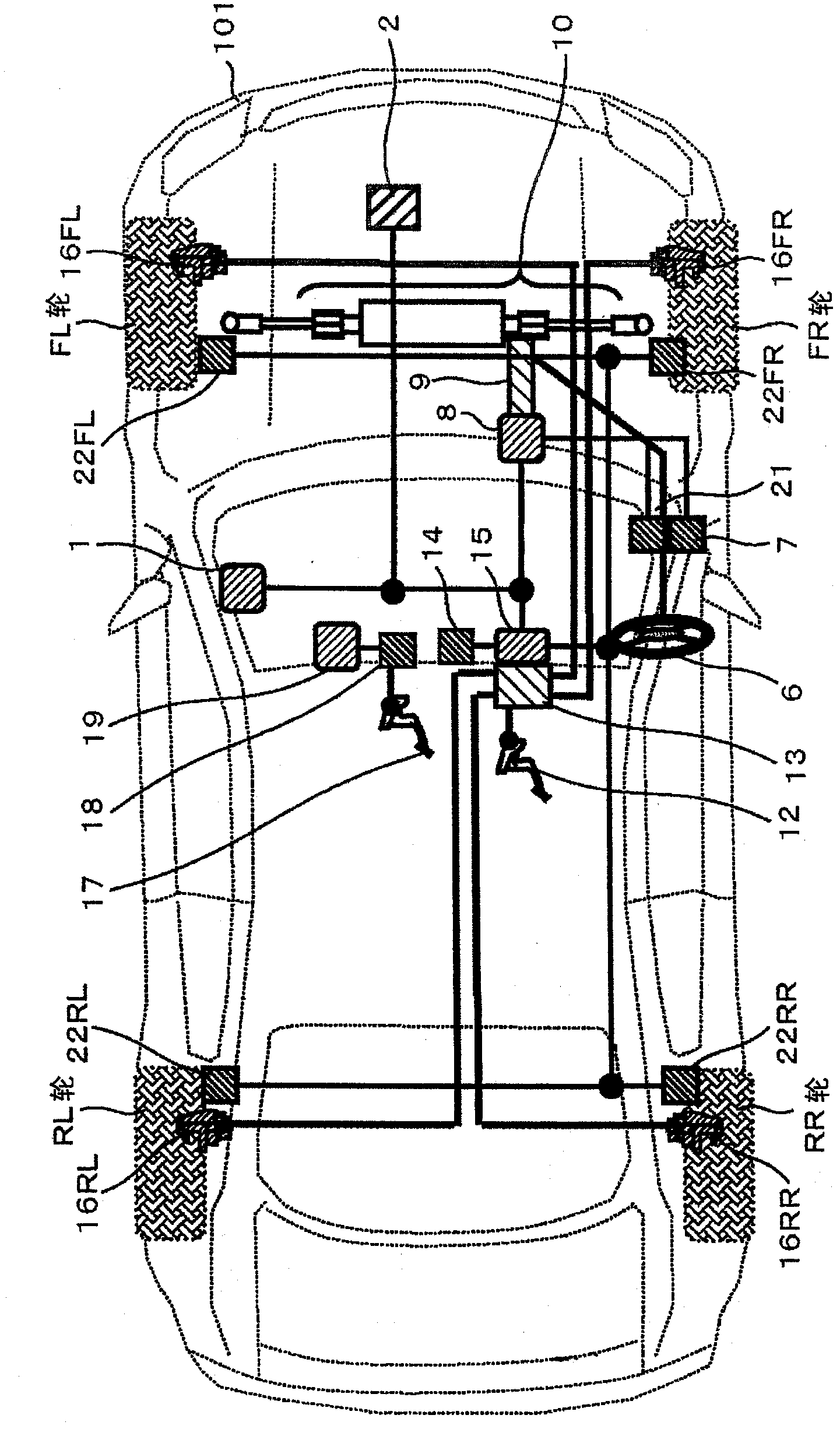
[0034] figure 1 It is a figure which shows a driving assistance device. It should be noted that the FL wheel represents the left front wheel, the FR wheel represents the right front wheel, the RL wheel represents the left rear wheel, and the RR wheel represents the right rear wheel. The driving assistance device 101 includes: a sensor 2 for recognizing the front of the vehicle; various actuators (steering control mechanism 10, brake control mechanism 13) for performing driving assistance based on information obtained by the sensor; The comprehensive control device 1 that calculates the command value of the actuator; the steering control device 8 that controls the steering control mechanism 10 according to the command value from the comprehensive control device 1; Brake control device 15 that adjusts the distribution of braking force to each wheel. The integrated control device 1 , the steering control device 10 , and the brake control device 15 are connected via an in-vehicl...
Embodiment 2
[0062] Hereinafter, Embodiment 2 will be described using the drawings. Figure 9 The system structure is shown in . The second embodiment is an embodiment in which the brake control mechanism 13 and the brake control device 15 of the first embodiment are replaced with the yaw moment control mechanism 24 and the yaw moment control device 25 . Only the parts different from those in Example 1 will be described, and the description of the same parts will be omitted.
[0063] The integrated control device 1 , the steering control device 10 , and the yaw moment control device 2 are connected via an in-vehicle network such as CAN.
[0064] The yaw moment control mechanism 24 will be described. The yaw moment control mechanism 24 connects planetary gears (not shown) arranged in multiple rows between the left and right wheels, and inputs motor torque to a planetary gear on one side, so that the left and right wheels can be driven by a single motor (not shown). produce reverse torque...
Embodiment 3
[0069] Hereinafter, Embodiment 3 will be described using the drawings. to carry figure 1 The illustrated driving assist device 101 of the brake control device 15 is used as an example to illustrate the system structure of the third embodiment, but it may also be a driving assist device equipped with a driving force control device (not shown) and a yaw moment control device 25 . Only the parts different from those in Example 1 will be described, and the description of the same parts will be omitted.
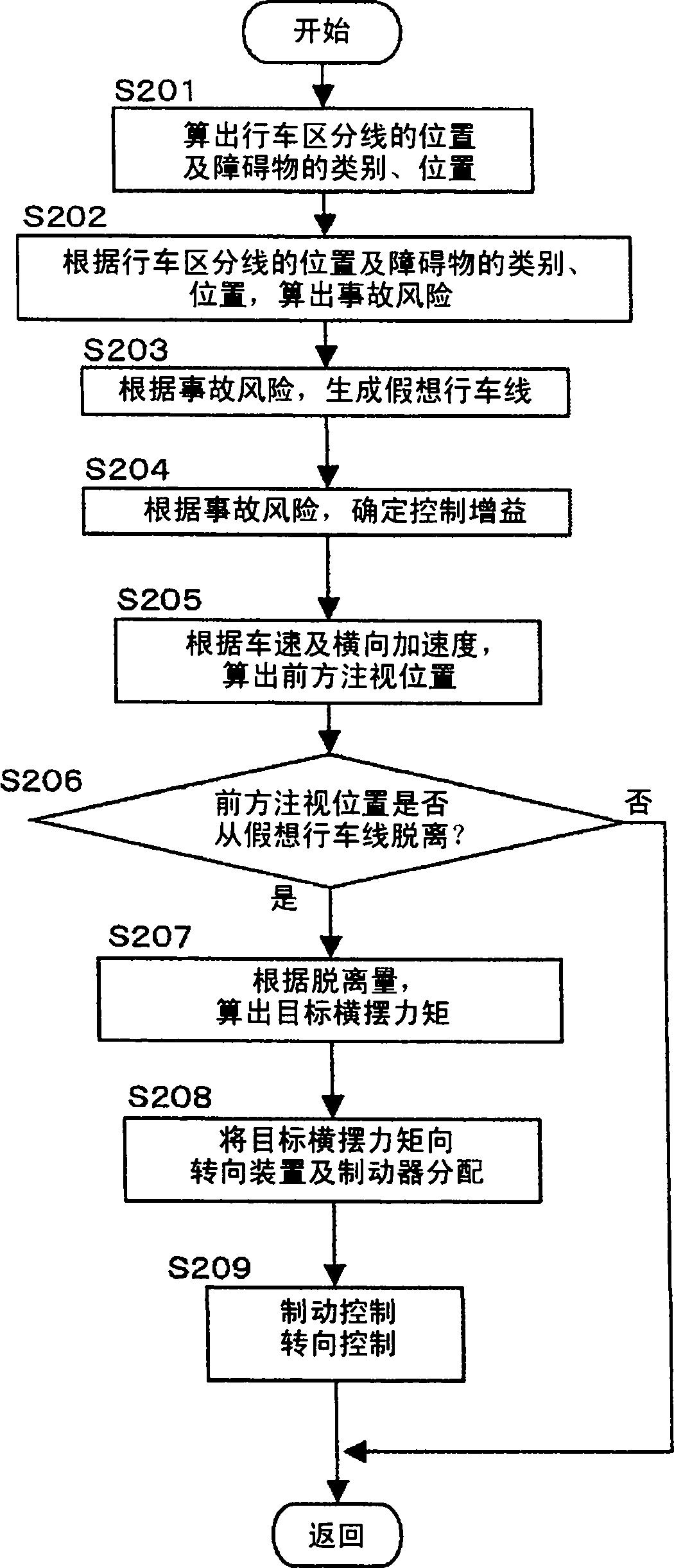
[0070] Except in the flowchart in embodiment 3 figure 2Steps other than S208 are the same as in Embodiment 1. And, the distribution of the target yaw moment is calculated by equations (2) and (3).
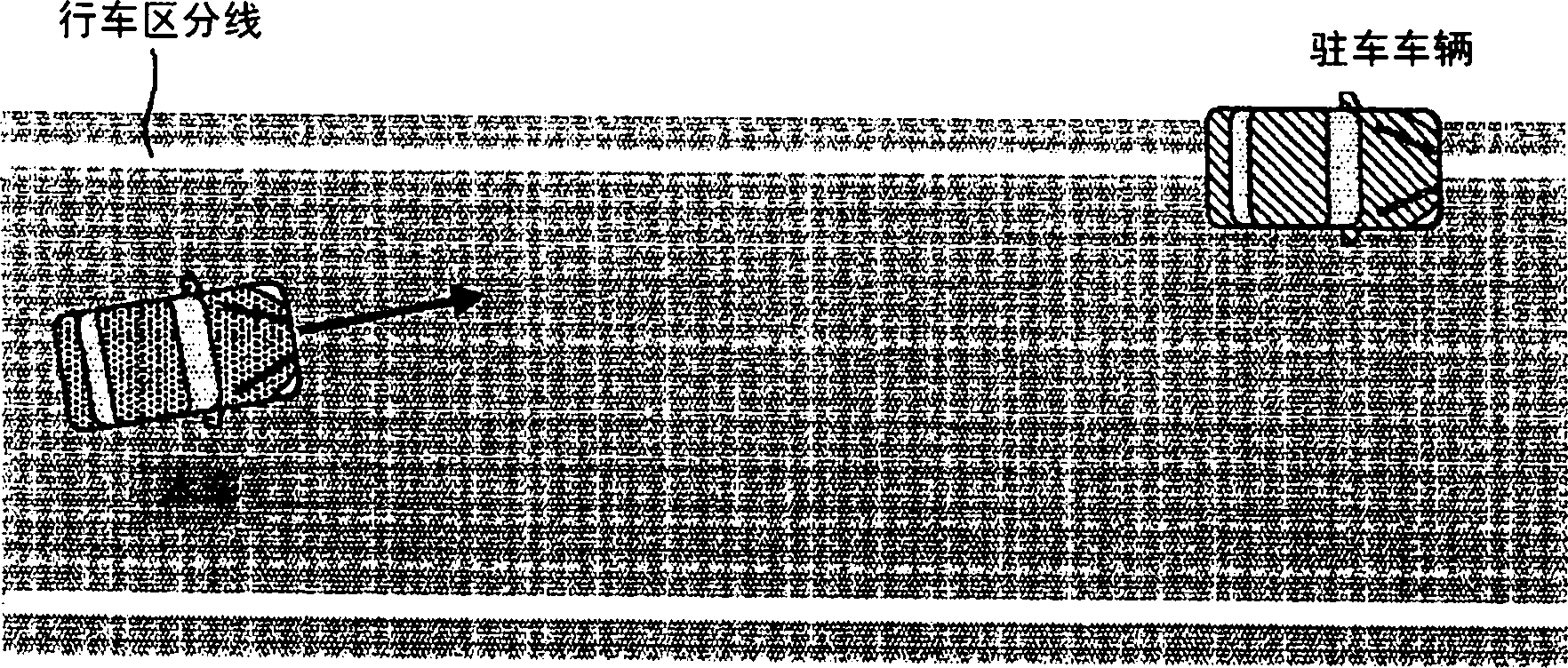
[0071] Next, the distribution method of the target yaw moment will be described. When driving at a high speed (for example, 120km / h) to avoid a collision through steering control, the vehicle's behavior changes greatly, so it is very scary for the driver. On the other hand, a yaw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More