

PIV (Particle Image Velocimetry) image high-frequency acquisition method
A high-frequency acquisition and image technology, applied in the direction of measuring devices, instruments, fluid velocity measurement, etc., can solve the problems of limited time interval, limited large-scale application, high-frequency camera, etc., so as to reduce the shooting frequency and reduce the cost price effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0013] The accompanying drawings disclose, without limitation, structural schematic diagrams of preferred embodiments involved in the present invention. The technical solutions of the present invention will be described in detail below in conjunction with the accompanying drawings.
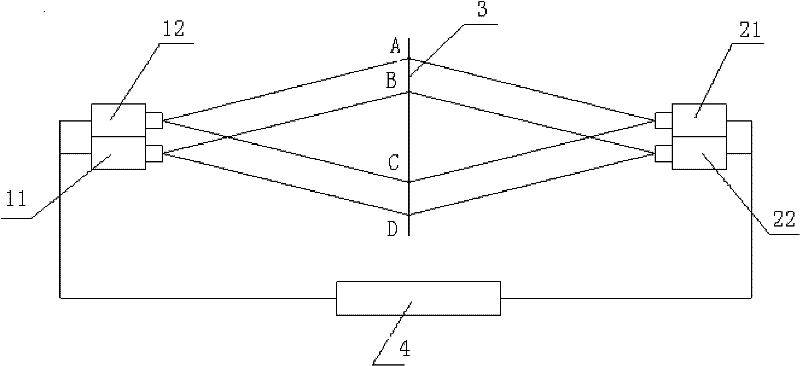
[0014] like figure 1 As shown, in the high-frequency acquisition method of PIV images described in the present invention, at first, two groups of camera arrays are arranged symmetrically, and each group of camera arrays includes at least two cameras; Shoot the tracer particles in the flow field in the field of view, and input the images taken by each camera into the computer; use autocorrelation technology to process the particle images taken by each camera, and obtain the flow field vector data in the corresponding field of view of each camera, and at the same time , the coordinate transformation relationship between the image information captured by each camera and the light plane 3 is establis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More