

Butting mechanism between every two unit modules of modular self-reconfigurable robot and butting method
A technology of unit modules and docking mechanisms, which is applied in the direction of joints, manipulators, manufacturing tools, etc., can solve the problems of weak shear resistance, unreliable connection, and small load capacity of the docking surface, and achieve stable and reliable connection performance and compact connection mechanism , The effect of rapid separation action
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
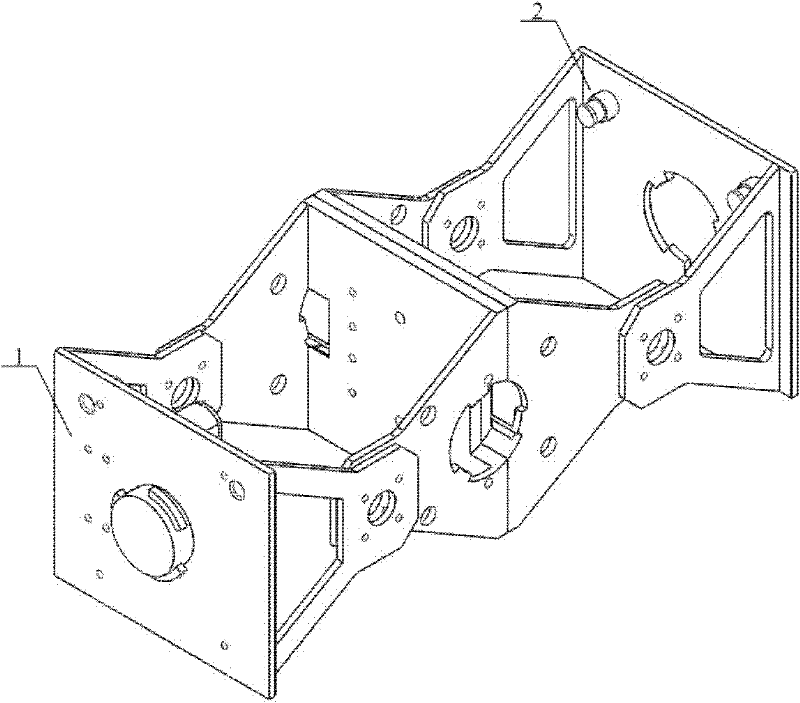
[0020] see figure 1 , the unit module is provided with a frame-type forearm and a rear arm, the front and rear arms are symmetrically arranged and connected as a whole, the front and rear arms are respectively provided with a butt surface, the forearm butt surface 1, and the rear arm butt surface 2.
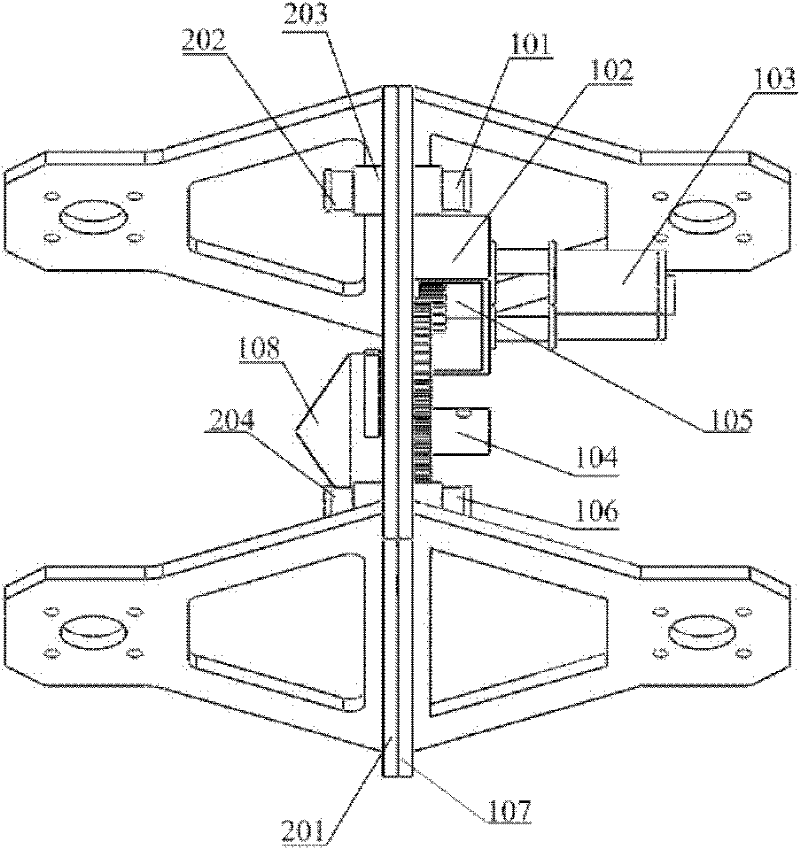
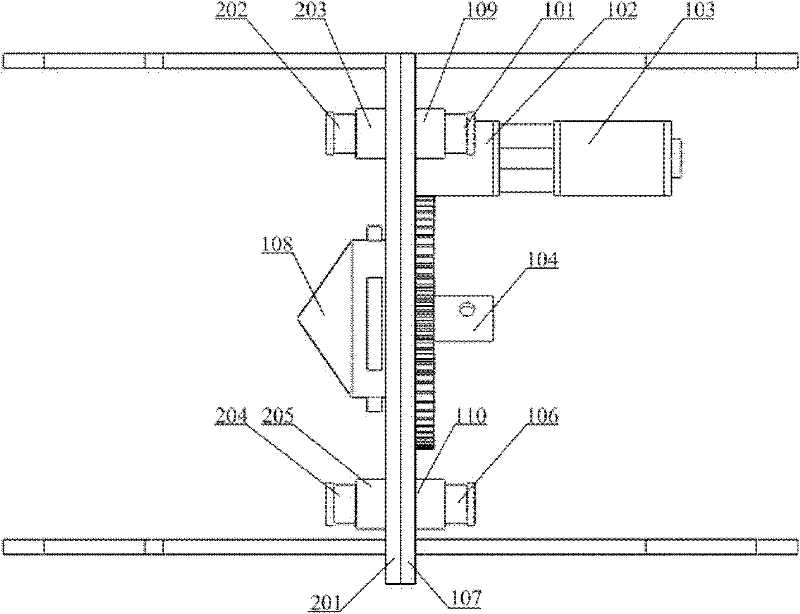
[0021] see Figure 2-4 , with the forearm of one unit module on the right and the rear arm of the other unit module on the left. On the inner side of the forearm docking surface, a motor 103 is arranged, and the motor is fixed on the docking surface 107 through a bracket 102. The output shaft of the motor is perpendicular to the docking surface, and a gear 105 is fixedly installed at the end of the output shaft, and a bearing is installed in the center of the forearm docking surface. The through hole is provided with a gear, the gear is provide...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More