

Full line control electric vehicle with variable kinetic characteristics
A technology of dynamic characteristics and electric vehicles, applied in the direction of power devices, electric steering mechanisms, motion deposition, etc., can solve the problem of inability to adapt to the driver's personalized driving style and needs, inability to assist vehicle control, driver burden, etc. problem, to achieve the effect of variable dynamic characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
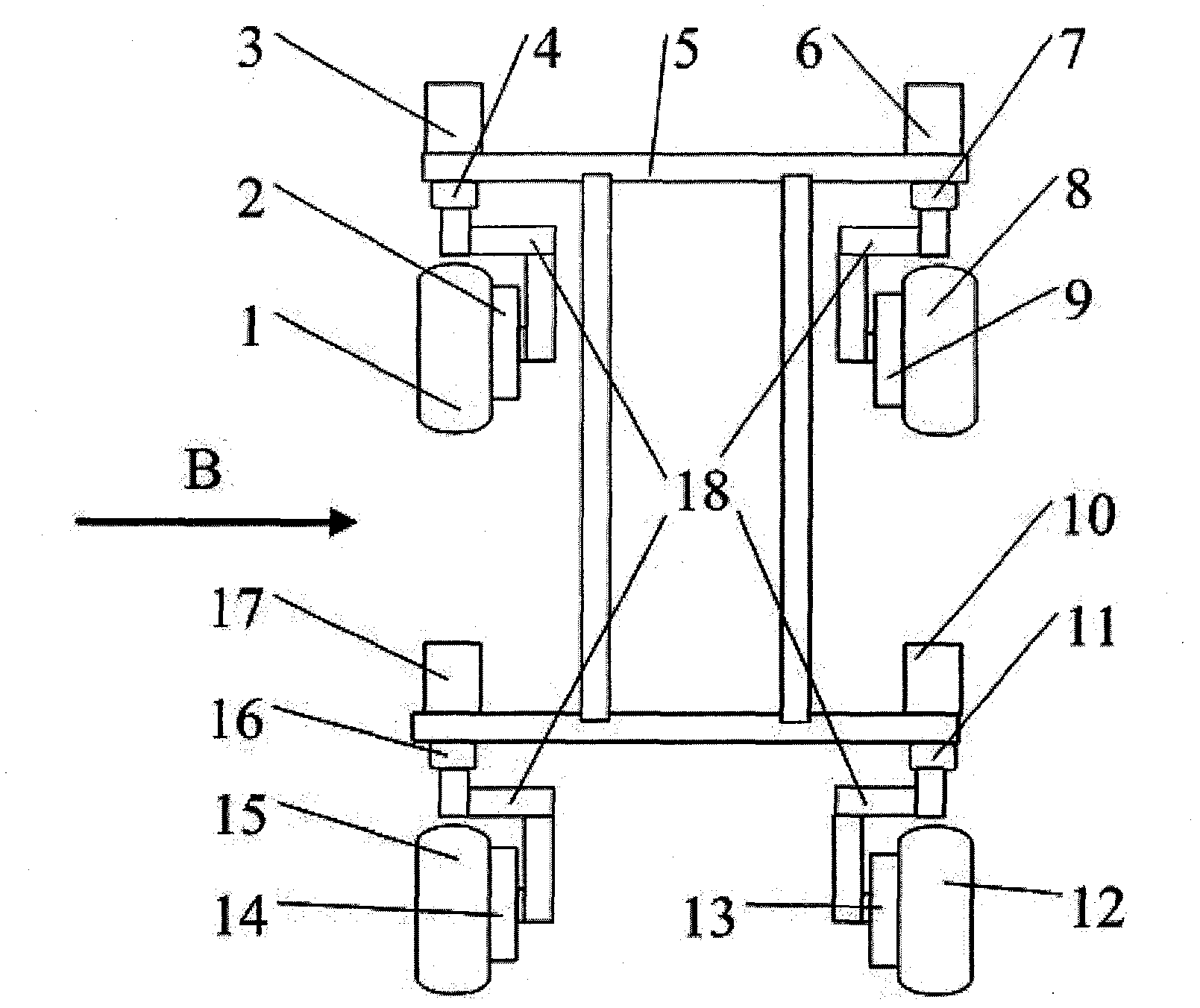
[0026] Below in conjunction with accompanying drawing 1, the mechanical structure of the electric vehicle proposed by the present invention will be described in further detail. In Fig. 1, 1 is the left front wheel of the electric vehicle, and 2 is the hub motor in 1. The left front wheel 1 is coaxial with the left front wheel hub motor 2, and the left front wheel 1 is fixedly connected with the outer rotor of the left front wheel hub motor 2. 18 is unsprung vehicle frame (comprising kingpin shaft and wheel axle), by unsprung vehicle frame 18, left front wheel 1, left front wheel inner wheel hub motor 2 and the steering motor 3 of left front wheel, left front wheel The active suspension 4 and the vehicle frame 5 are connected. The inner stator of the left front wheel hub motor 2 is fixedly connected with the horizontal axle shaft on the unsprung vehicle frame 18 . 3 is the steering motor of the left front wheel 1, 4 is the active suspension with adjustable stiffness and dampi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More