

Mandibular movement imitating robot
A robot and mandible technology, applied in the field of bionic robots, can solve the problems of low bionicity and achieve the effects of high degree of bionics, simple overall mechanism, and good dynamic characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
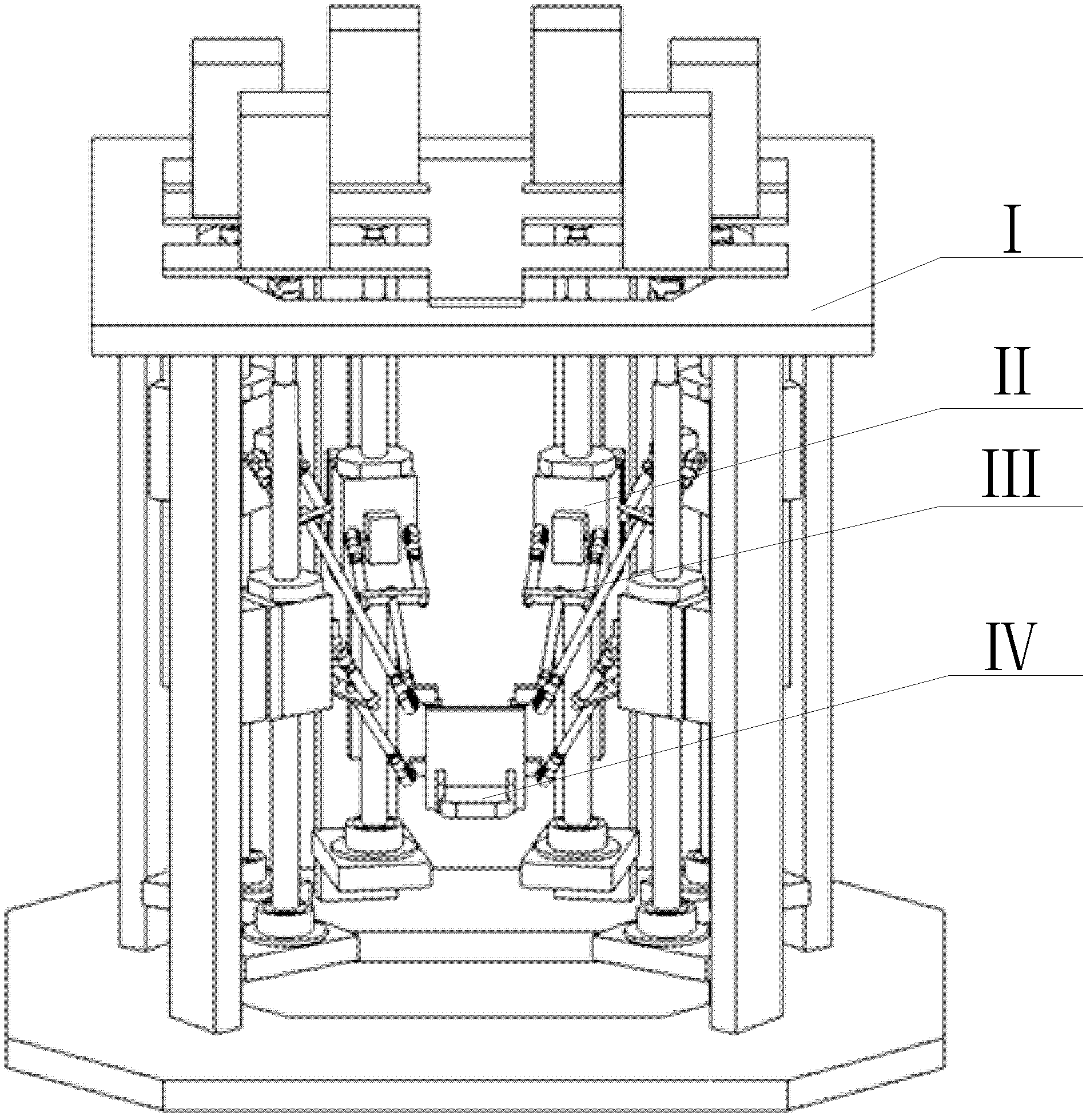
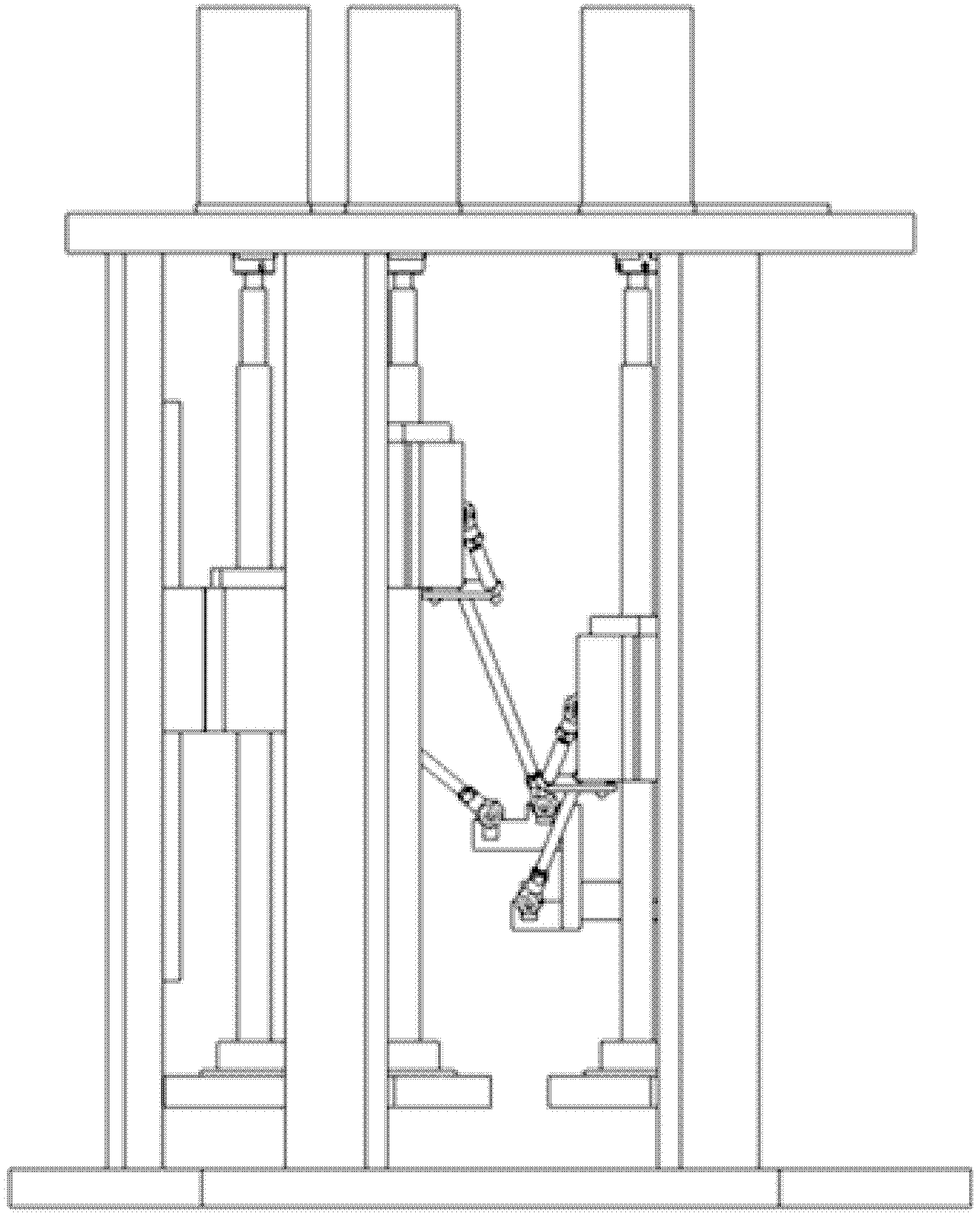
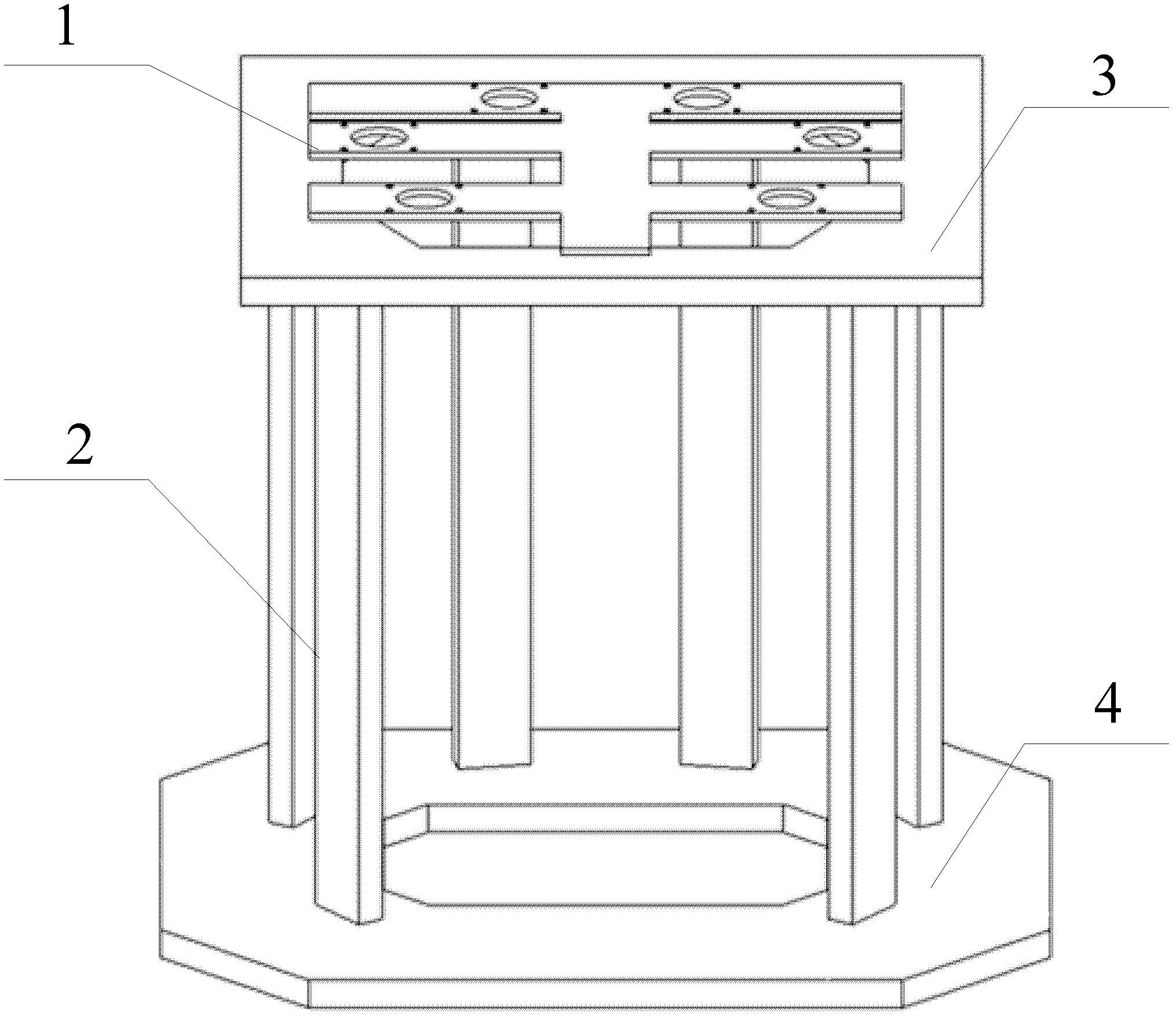
[0026] The imitation mandible movement robot includes a static platform, a driving device, a kinematic branch chain and a mandibular platform, and adopts servo drive to realize the movement of mandible opening, closing and occlusal.
[0027] Concrete action process of the present invention
[0028] According to the jaw movement to be realized, the motor 5 transmits the rotation to the lead screw 7 through the coupling 6, and the lead screw 7 drives the lead screw nut 8 to move, which is converted into a linear motion of the lead screw nut 8. The workbench 10 is fixed on the lead screw nut 8, realized that the workbench 10 moves linearly on the guide rail 13. The two ends of the motion branch chain III are respectively connected with the joint connection block 9 fixed on the workbench 10 and the mandibular joint connection ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More