Walking robot and walking method thereof
A technology of walking robot and driving mechanism, which is applied in the fields of motor vehicles, transportation and packaging, etc., and can solve problems such as unstable walking of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] In the following, the present invention will be further described in conjunction with the accompanying drawings and specific embodiments, so as to understand the technical idea claimed in the present invention more clearly.
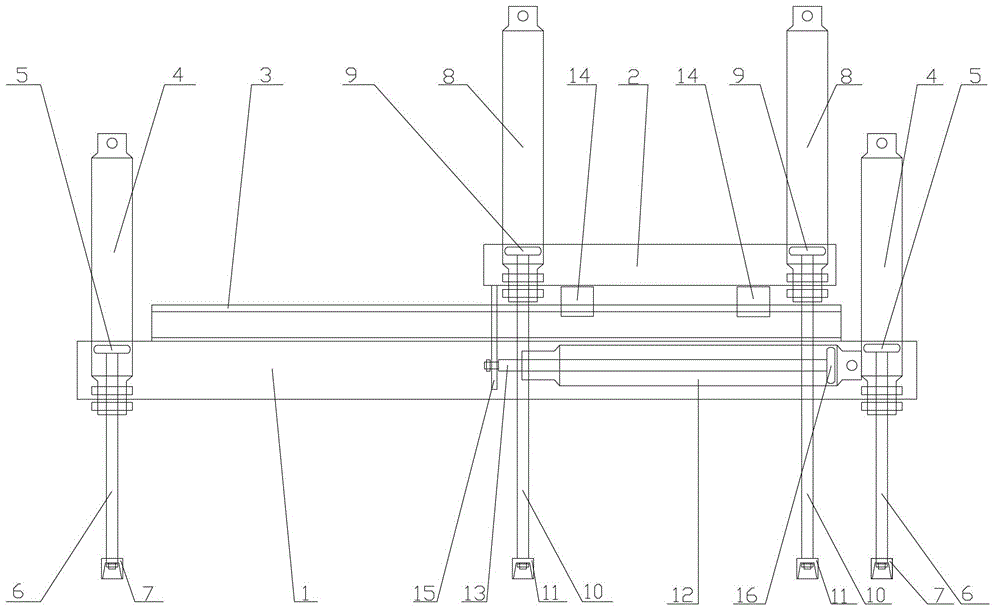
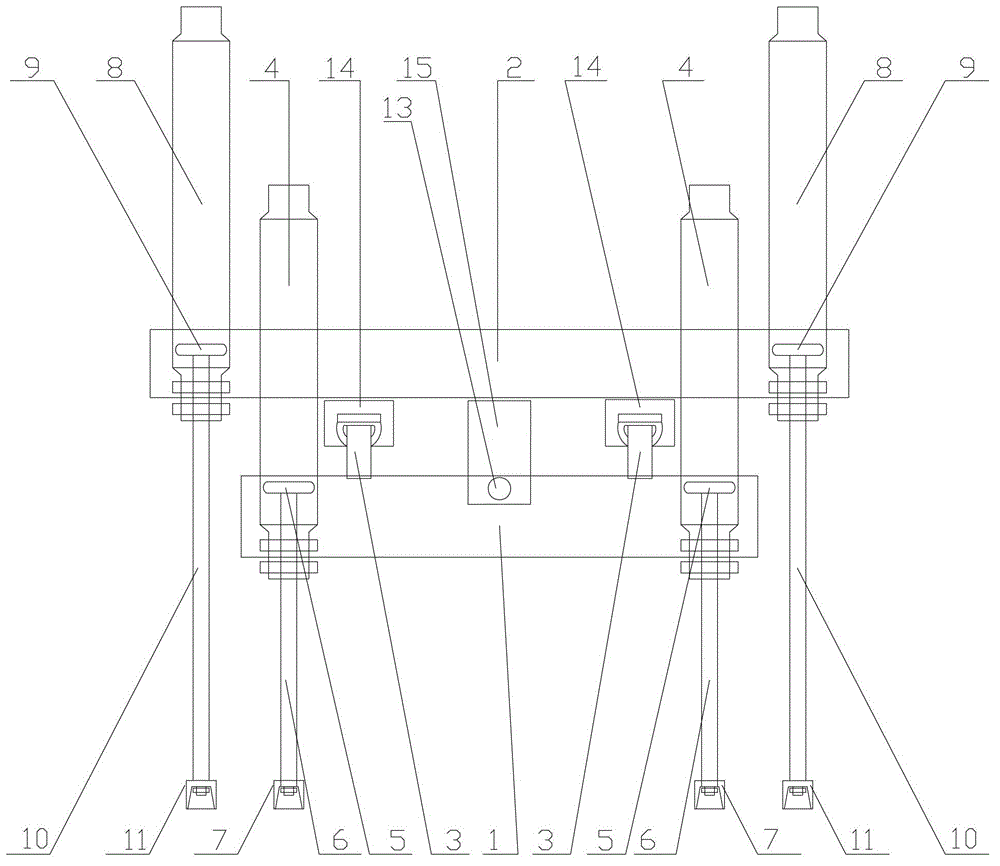
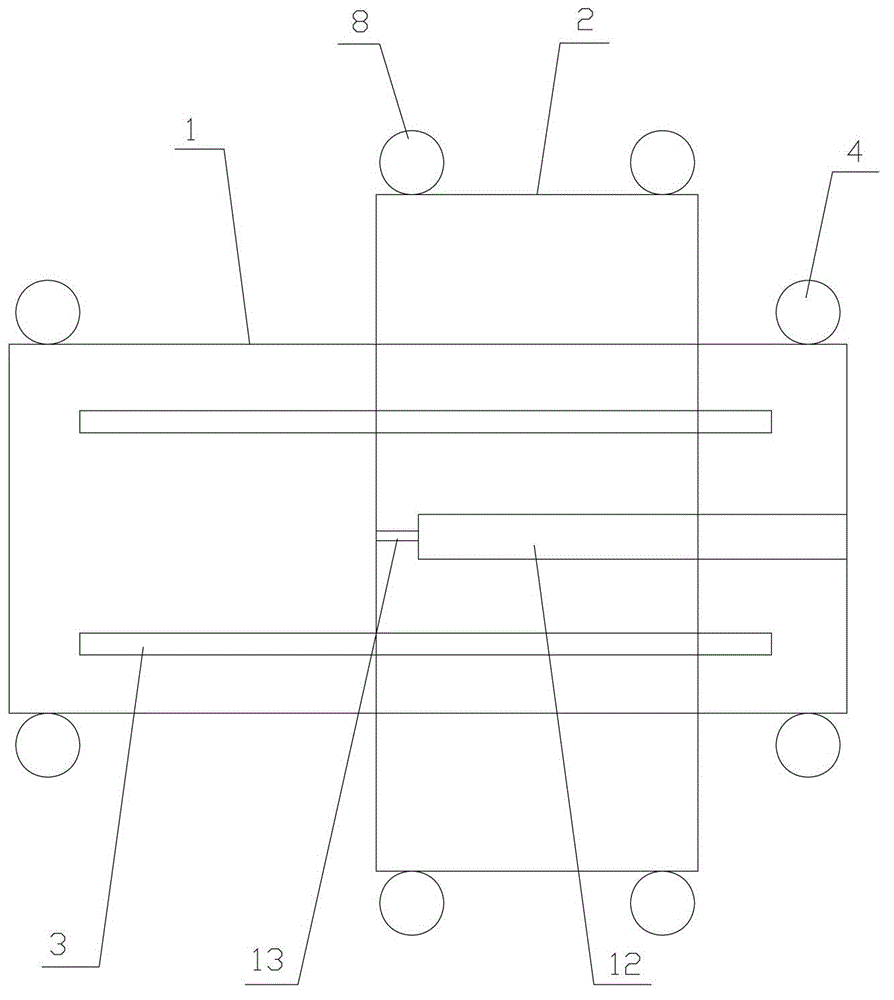
[0042] Such as Figure 1 to Figure 3 with Figure 13 As shown, the walking robot includes an upper base 2, a lower base 1, two straight guide rails 3, four sliders 14, four first support rods 17, four second support rods 18, and a controller (not shown in the figure) , an action generator (not shown in the figure), an action executor (not shown in the figure) and a level monitor (not shown in the figure).
[0043] The upper base 2 and the lower base 1 are both frame structures (such as a square frame, or a plurality of dividing frame strips are arranged in the square frame), the upper base 2 and the lower base 1 are parallel to each other, and the upper base 2 is located above the lower base 1. The width of the upper base 2 is greater than that o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com