

Robot for working on vertical surface of building
A technology for robots and buildings, applied in the field of robots, can solve the problems of unusable buildings, low operation efficiency, and difficulty in climbing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
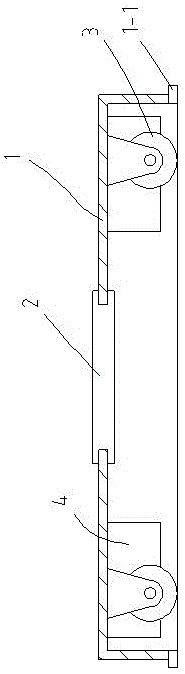
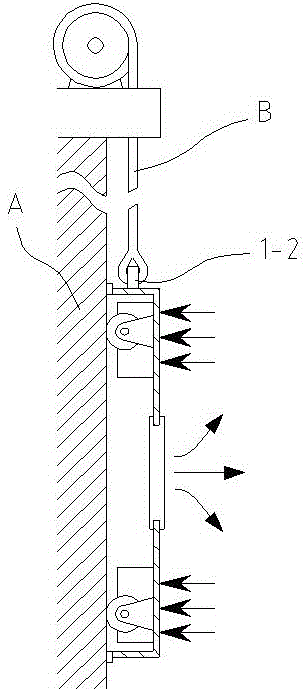
[0015] A robot for building facade operations, the structure of which is: the robot is composed of a housing 1, a negative pressure fan 2, a running wheel 3 and a running motor 4; A closed cavity structure, a sealing ring 1-1 is provided on the periphery of the opening on the inner end surface of the housing 1, and a vent is provided in the middle of the outer end surface of the housing 1, and the vent connects the inner cavity of the housing 1 and the external environment; Negative pressure blower 2 is arranged in the air vent, and negative pressure blower 2 can make the gas in housing 1 flow to the outside; Described traveling wheel 3 and traveling motor 4 are arranged in the inner chamber of housing 1, and traveling wheel 3 and traveling The motor 4 is connected by transmission; when the casing 1 is close to the working surface, the running wheel 3 is in contact with the working surface.
[0016] Further, a negative pressure sensor is provided in the inner cavity of the hou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More