

Camera self-calibration method based on three orthogonal direction end points
An orthogonal direction, camera technology, applied in the field of computer vision research, can solve the problem that square pixels are difficult to guarantee, and achieve the effect that is easy to achieve
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0043] The present invention proposes a camera self-calibration method based on the disappearance of three orthogonal directions, using the vanishing points of three mutually orthogonal straight lines in the scene to form constraints on the absolute quadratic curve image, and finally realizing the camera self-calibration by solving the constraint equation calibration.
[0044] Embodiment of the present invention is described in more detail with an example below:
[0045] (1) Solve the coordinates of the vanishing point in three orthogonal directions
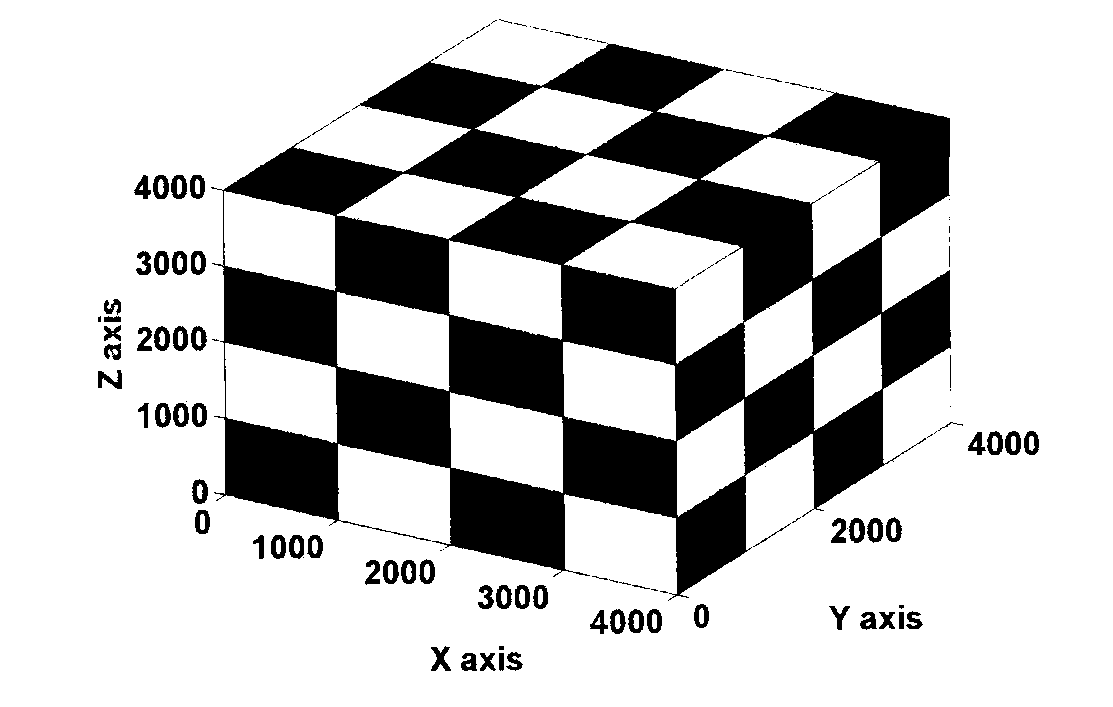
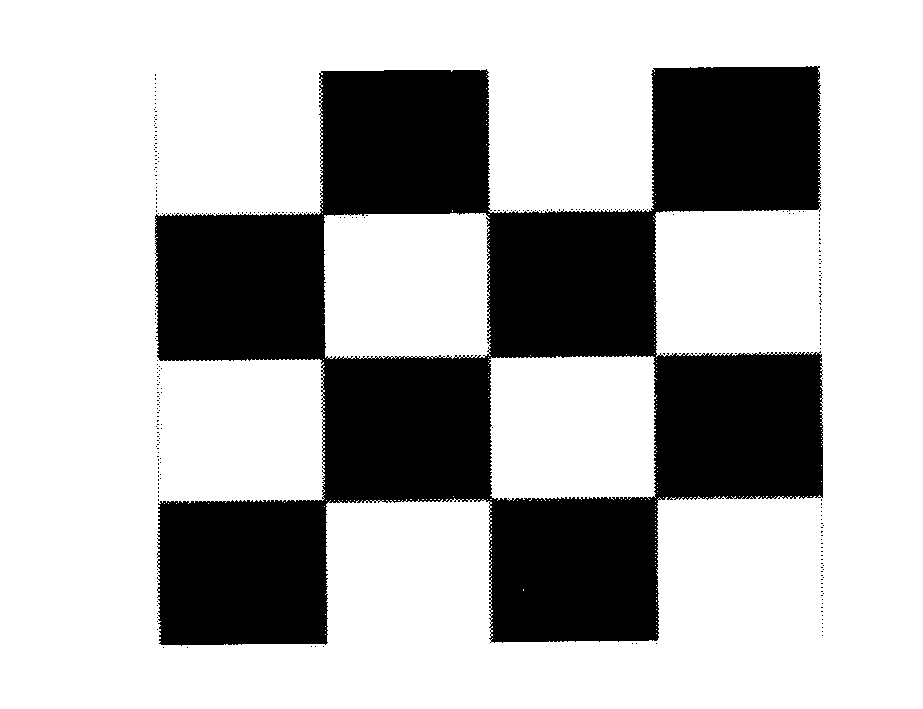
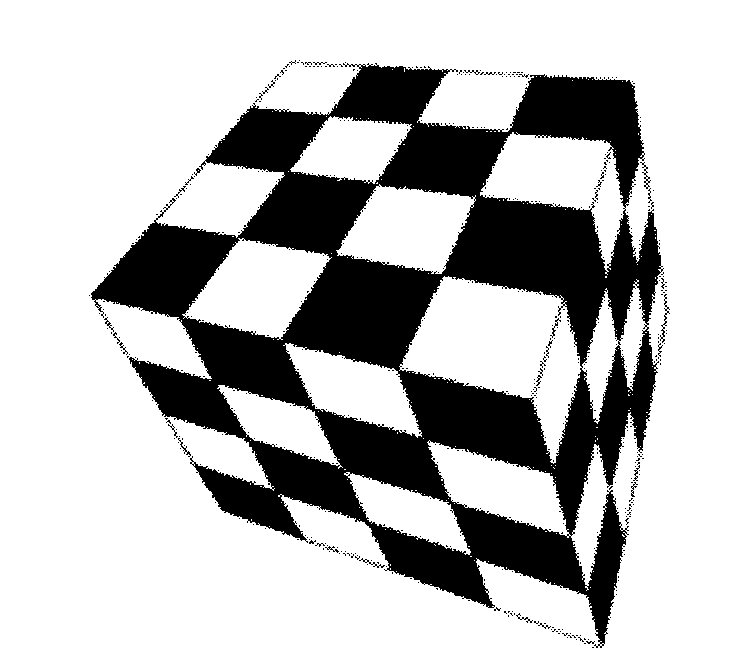
[0046] Such as figure 1 It is a cube with three side lengths (Xaxis, Yaxis, Zaxis) of 4000 pixels in three-dimensional space. Assume that a certain vertex of the cube is the origin of the world coordinate system, and three sides that are orthogonal to each other are the coordinate axes of the world coordinate system. figure 2 , image 3 for figure 1 Images of the neutral cube at two different viewing angles. figure 2 Reco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More