

Structure optical parameter demarcating method based on one-dimensional target drone
A structured light and target technology, applied in the field of measurement, can solve the problems of increased cost, limited processing size of high-precision two-dimensional and three-dimensional targets, and difficulty in guaranteeing the processing accuracy of two-dimensional and three-dimensional calibration targets, and achieves low cost and simple structure. , Reduce the effect of parameter calculation link
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
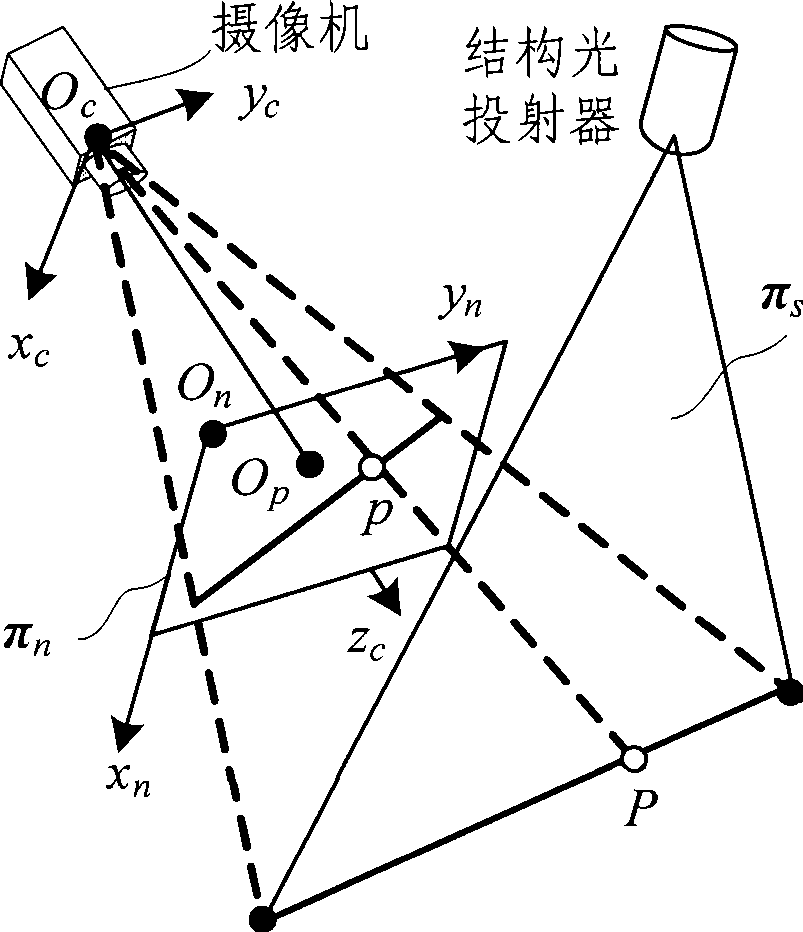
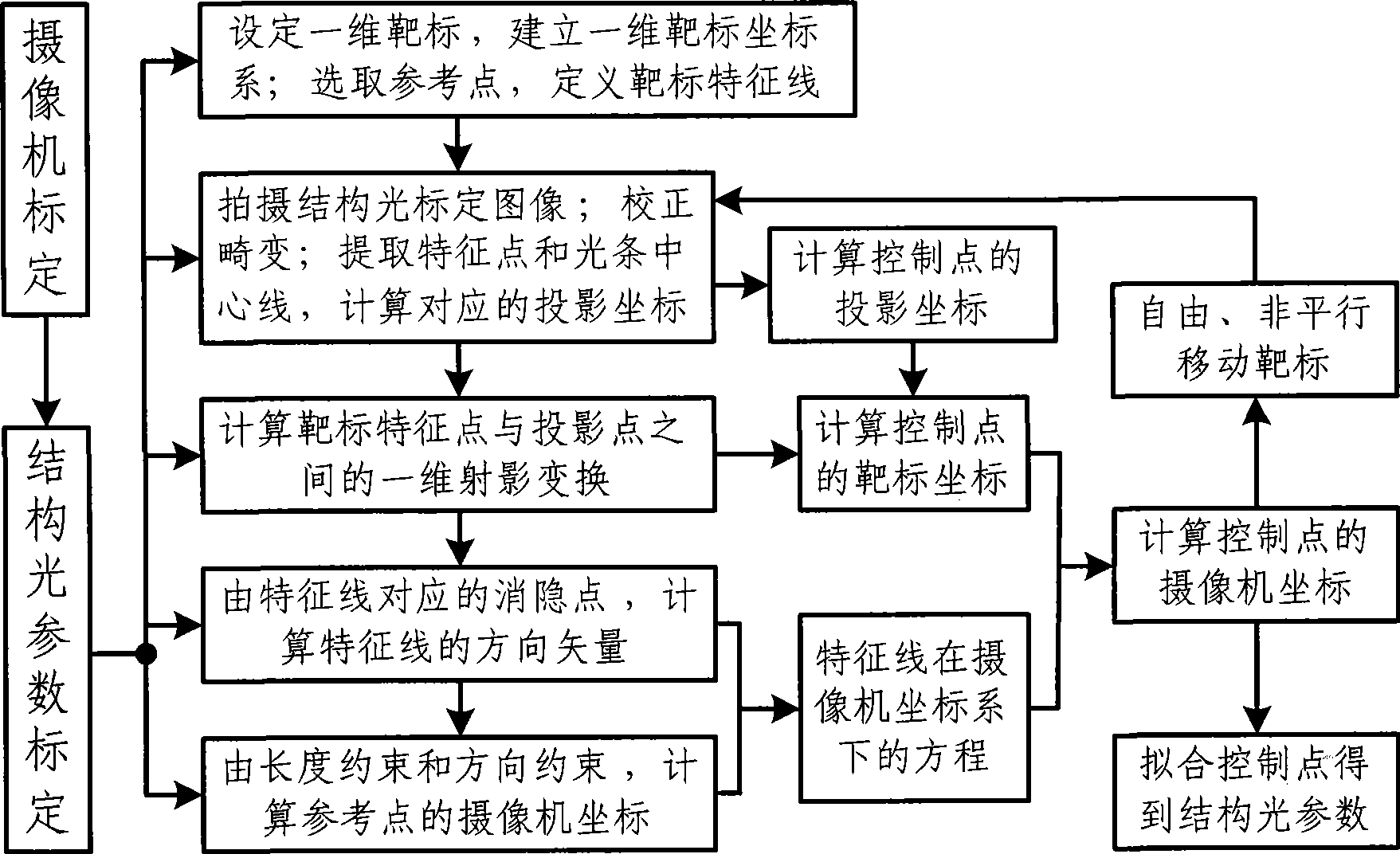
[0071] The process of the structured light parameter calibration method based on the one-dimensional target is as follows: figure 2 shown. WAT-902HCCD camera and 12mm lens are used to form a lens and a structured light projector to form a structured light vision sensor, and the image resolution is 768pixels×576pixels. One-dimensional targets can be designed as image 3 As shown, the center point of the white circle in the figure is the target feature point. The distance between target feature points is 14mm, and 8 feature points are set.
[0072] In order to facilitate the comparison test, a printed two-dimensional checkerboard target is used. The feature points on the target are 6×8 grid points, and the distance between the grid points is 14mm. Figure 4 image for the experiment. According to the planar target calibration method with constant cross ratio, 6 control points can be obtained for each image. image 3 Each row of the shown two-dimensional target is equivalent...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More