Robot synchronous positioning and map construction method and system
A technology of map construction and simultaneous positioning, which is applied in the directions of instruments, 3D modeling, image enhancement, etc., and can solve the problem of less research on line segment features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059]In order to make the purpose, technical solutions and advantages of the present application clearer, the present application will be further described in detail below with reference to the accompanying drawings and examples.
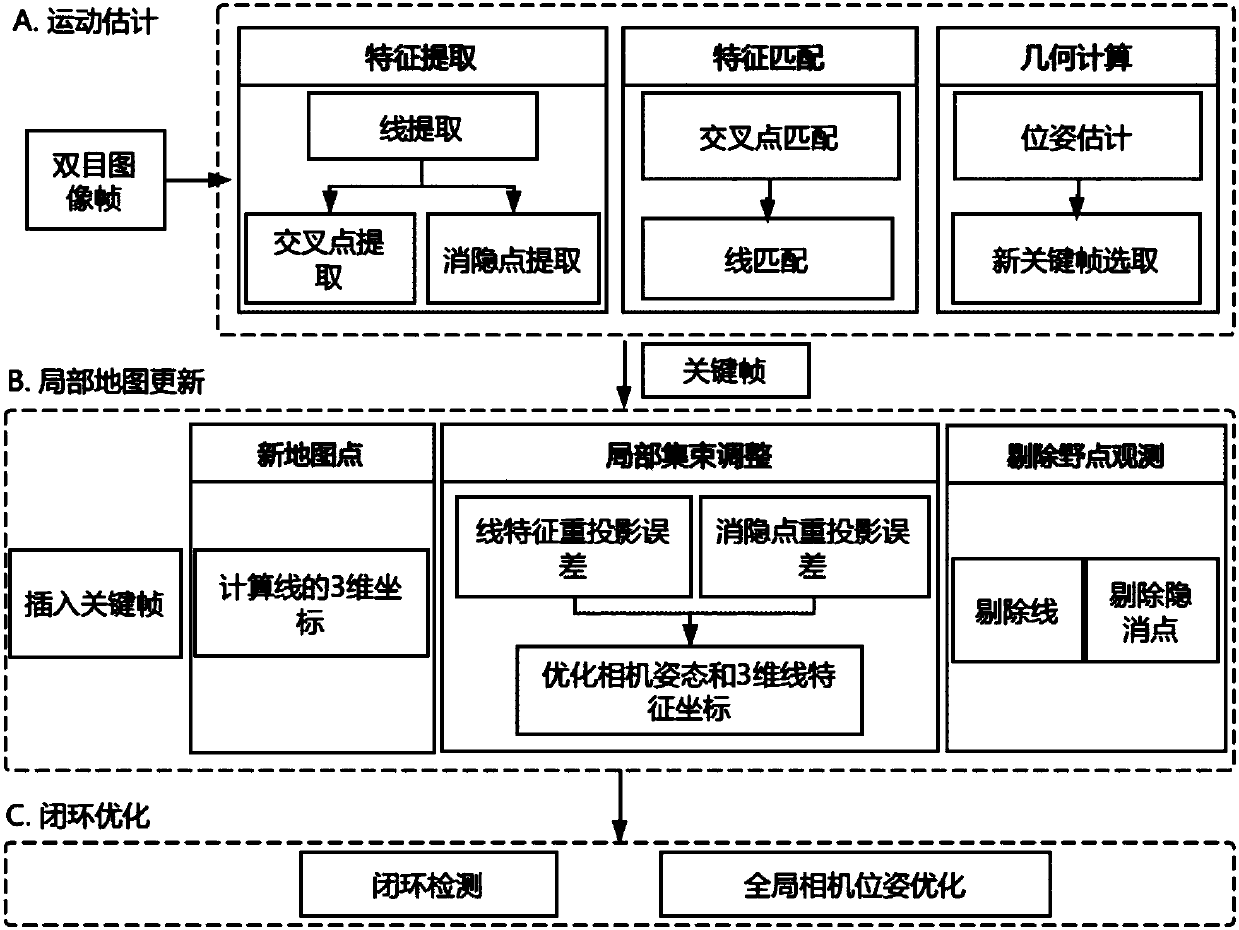
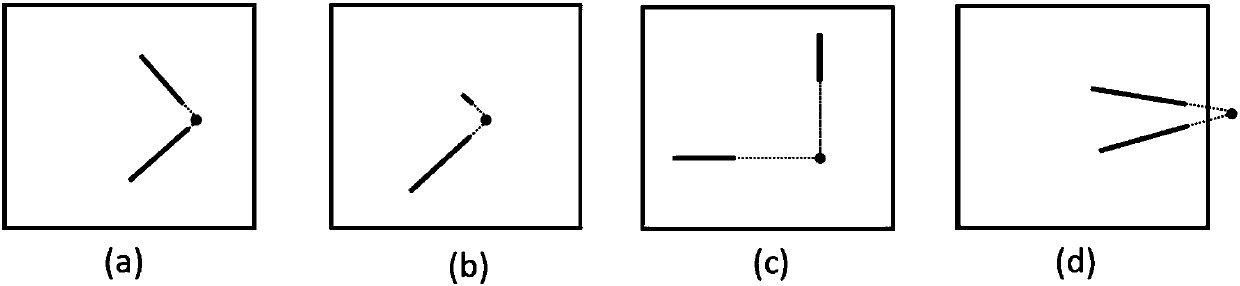
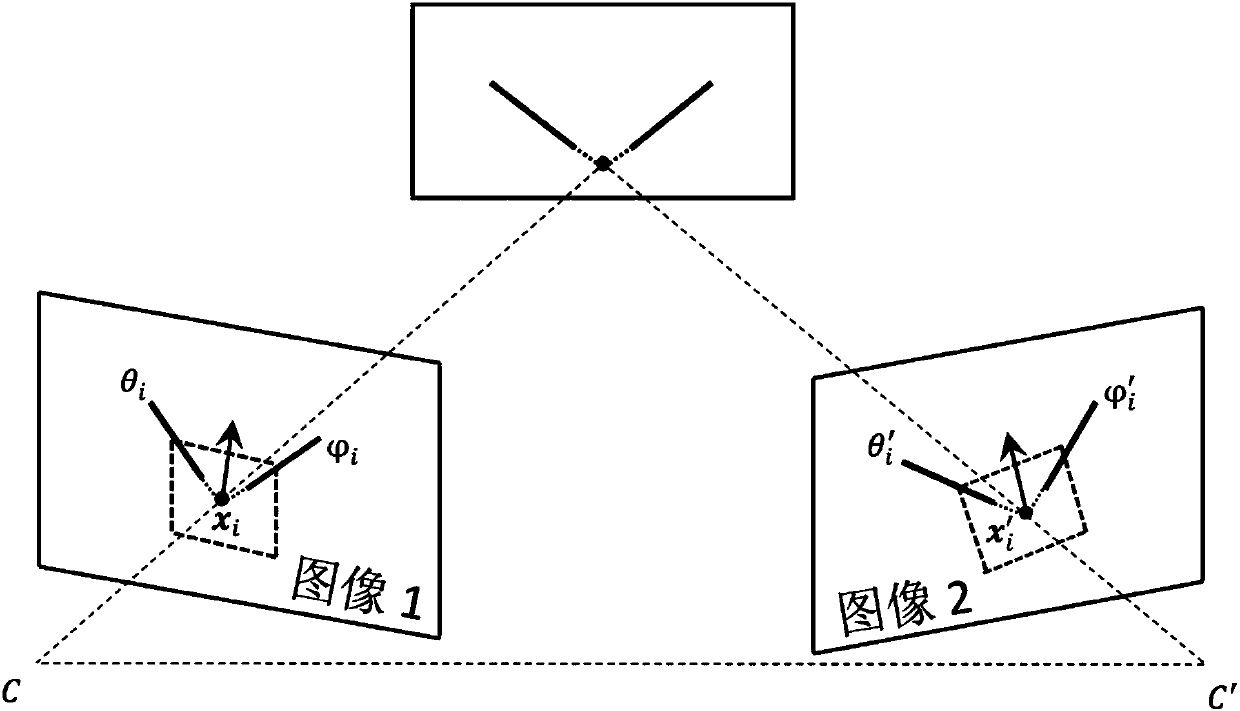
[0060] The invention proposes a method for synchronous positioning and map construction based on line segment features and line segment blanking points. Simultaneous localization and mapping (simultaneous localization and mapping) mentioned in the present invention, referred to as SLAM, refers to: the robot starts from an unknown location in an unknown environment and observes map features (for example, Point features, line segment features, etc.) to position itself, and then build a map incrementally according to its own position, so as to achieve the purpose of simultaneous positioning and map construction. The vanishing point mentioned in the present invention, also called vanishing point or vanishing point, refers to the intersection point of a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com