

A ground wire tension pole tower bridge crossing device for a power transmission line inspection robot
A line inspection robot, transmission line technology, applied in the direction of overhead lines/cable equipment, etc., can solve the problems of obstacle crossing, inspection loss, increase the weight of the robot, etc., to achieve the effect of low cost, simple obstacle crossing and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
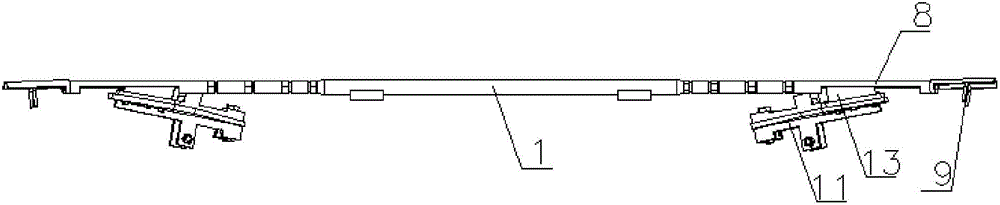
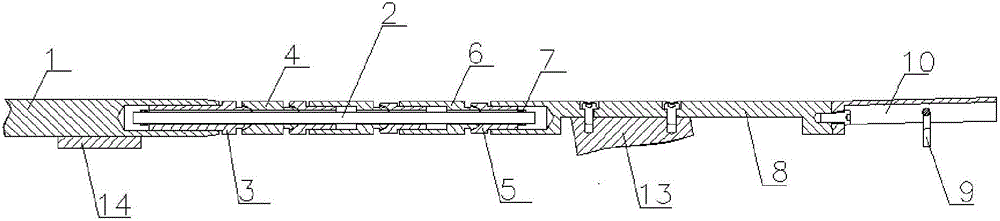
[0028] This device passes through the passage of the tension pole tower 17 as the machine inspection robot 18, and its main mechanism is a section of flexible bridge-passing mechanism. The flexible bridge-passing mechanism is connected to the cross-arm of the tension pole tower 17 through two support plates 14, and the end of the flexible bridge-passing mechanism is connected to the tension clamp through two sets of connecting and positioning components. When the inspection robot 18 traveling along the high-altitude transmission line travels along the transmission line 16 to the tension tower 17, the lock arm joint is released, and the shape of the two-wheel adaptive flexible bridge passing mechanism can roll over the bridge device and reach the tower 17. The other side has passed the tension tower 17. The line inspection robot traveling along the high-altitude transmission line can be selected from the patent No.: 201010195048.4, the name is: a robot for transmission line ins...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More