

Progressive type three-dimensional matching algorithm based on sectional matching and bayes estimation
A technology of Bayesian estimation and stereo matching, applied in the field of computer vision, which can solve problems such as loss of environmental information, large amount of calculation, and insufficient smoothness of depth images
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
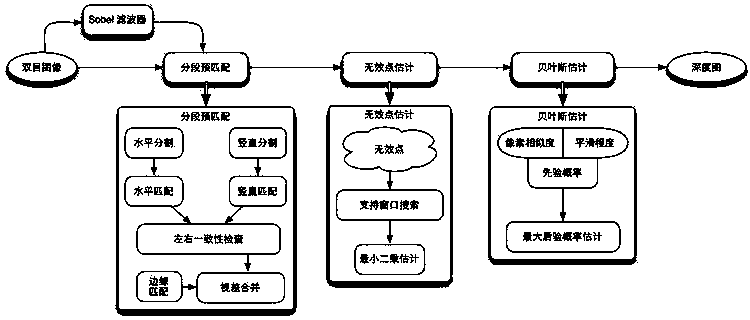
[0091] Such as Figure 4 The specific implementation process of the progressive stereo matching algorithm based on segment pre-matching and Bayesian estimation is shown. First obtain the binocular image; in the segmented pre-matching step, first perform horizontal pre-matching and vertical pre-matching, and then merge into a relatively sparse and rough pre-matching depth map; in the described invalid value estimation step, Estimate the invalid points in the pre-matching depth map according to the least squares estimation method, and densify it; in the Bayesian estimation step, use the method to correct the depth value to obtain a dense And accurate depth map. It can be seen from the results that the algorithm in the present invention extracts the depth map from the binocular image from coarse to fine, from sparse to dense, and has a good effect.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More