

Three-degree-of-freedom translation force feedback hand controller
A translational force and degree of freedom technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as being easily blocked by obstacles, unable to be applied, and susceptible to electromagnetic environment interference.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings.
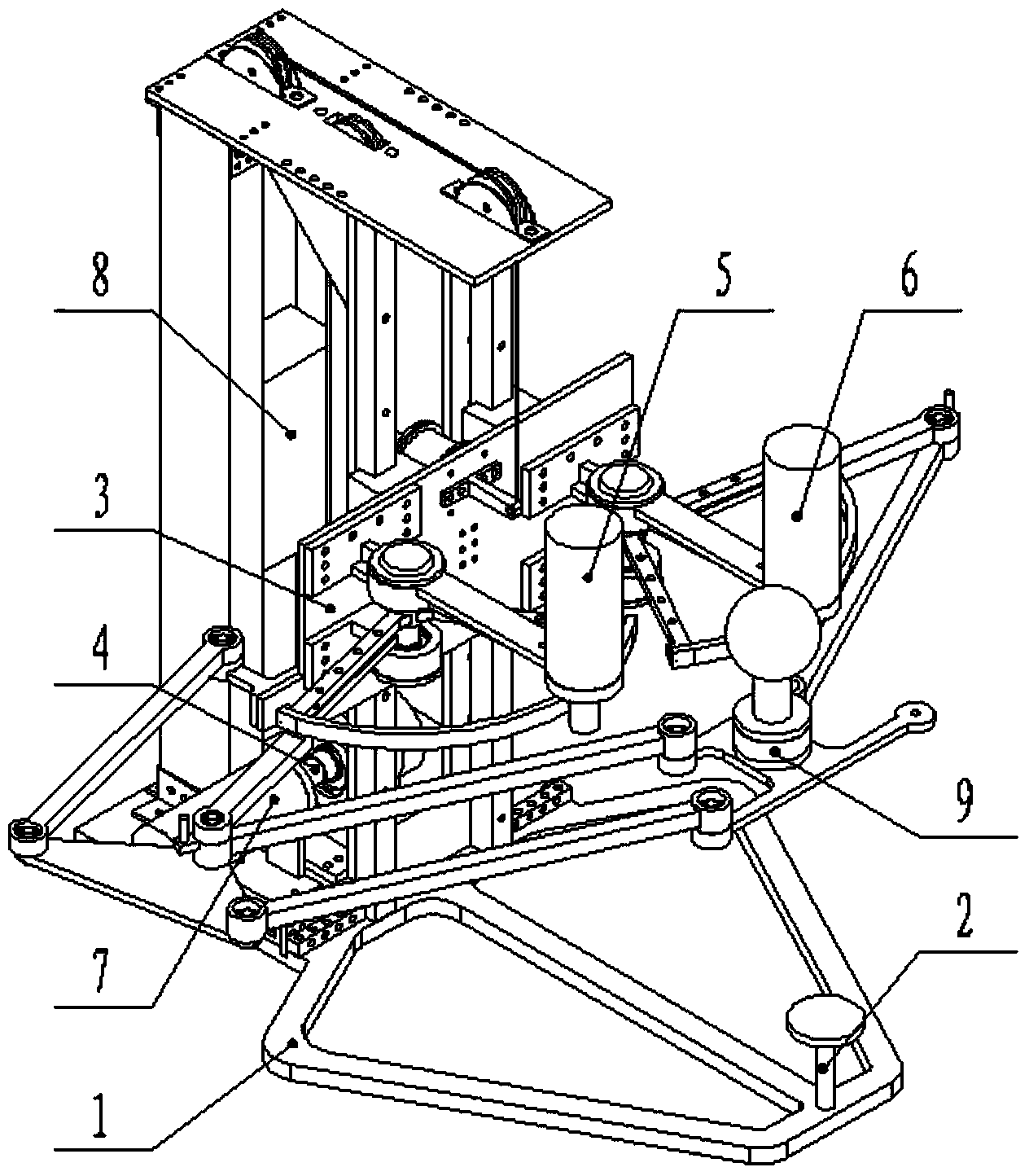
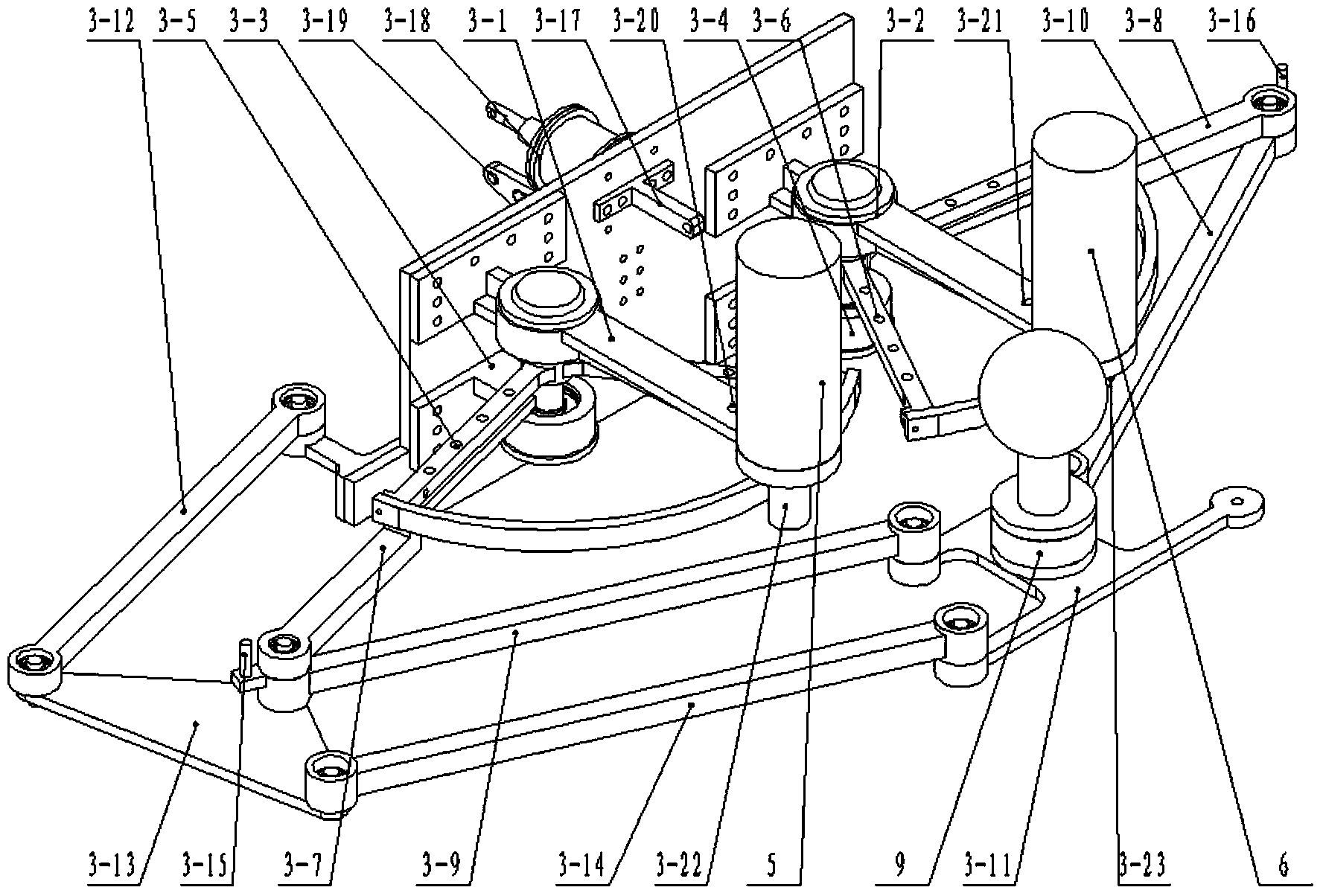
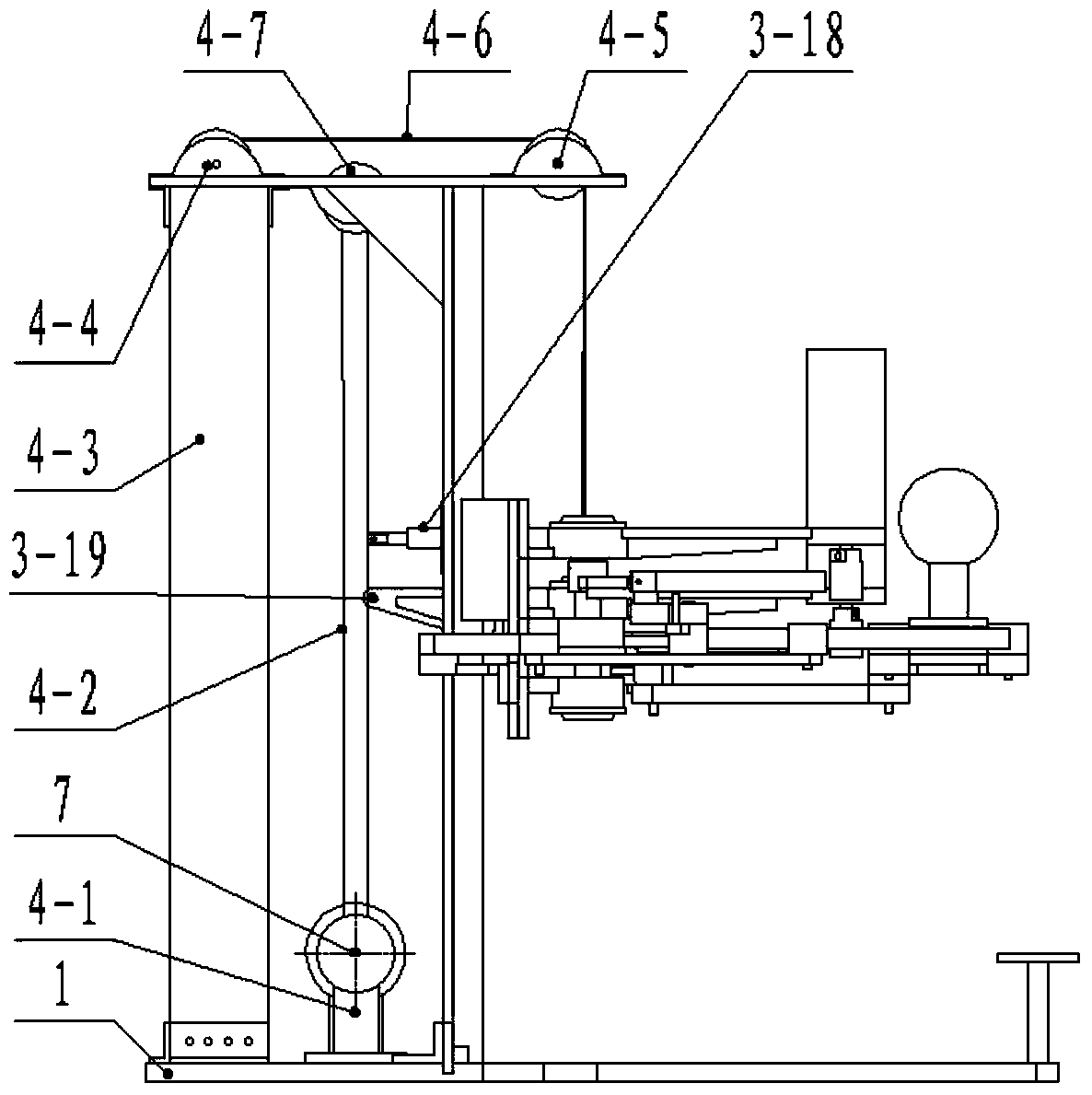
[0016] Plane motion part (3) mainly includes motor support 1 (3-1), motor support 2 (3-2), support 1 (3-3), support 2 (3-4), big wheel 1 ( 3-5), large wheel 2 (3-6), proximal rod 1 (3-7), proximal rod 2 (3-8), distal rod 1 (3-9), distal rod 2 (3 -10), moving platform (3-11), auxiliary rod 1 (3-12), auxiliary triangle (3-13), auxiliary rod (3-14), limit pin 1 (3-15), limit pin 2 (3-16), connector 1 (3-17), tensioning device (3-18), connector 2 (3-19), limit pin 3 (3-20), limit pin 4 (3 -21), small wheel 1 (3-22), small wheel 2 (3-23); the planar movement part (3) can realize planar movement with 2 degrees of freedom, perpendicular to the movement in the vertical direction, based on the planar five-bar The mechanism is improved, the drive motor 1 (5) and the drive motor 2 (6) are installed on the proximal rod to perform displacement detection and force feedback, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More