

Multi-sensor active fault-tolerant estimation method based on self-organization Kalman filtering
A Kalman filter and multi-sensor technology, applied in the direction of instruments, calculations, special data processing applications, etc., can solve the problems of filter divergence, unfavorable fault detection, loss of filter accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
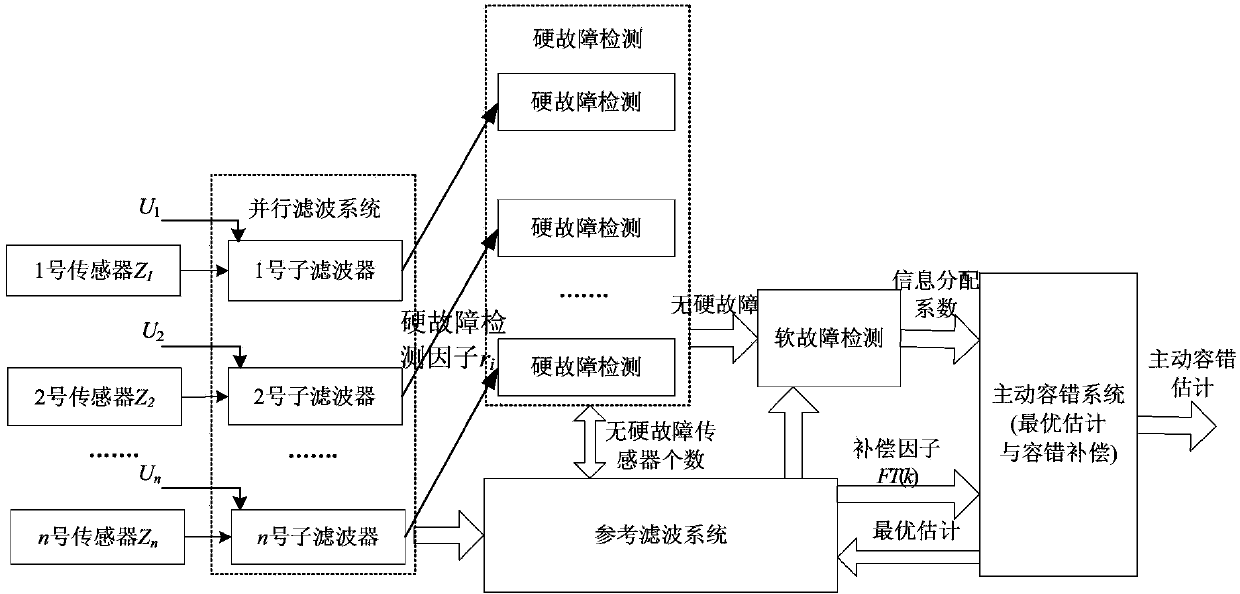
[0100] The present invention will be further described below in conjunction with the accompanying drawings and the active fault-tolerant estimation simulation experiment of a multi-sensor redundant system (for example: using an accelerometer as a sensor and a state quantity as a speed). The block diagram of the redundant sensor active fault-tolerant estimation method based on self-organizing Kalman is as follows: figure 1 As shown, the specific implementation steps are as follows:
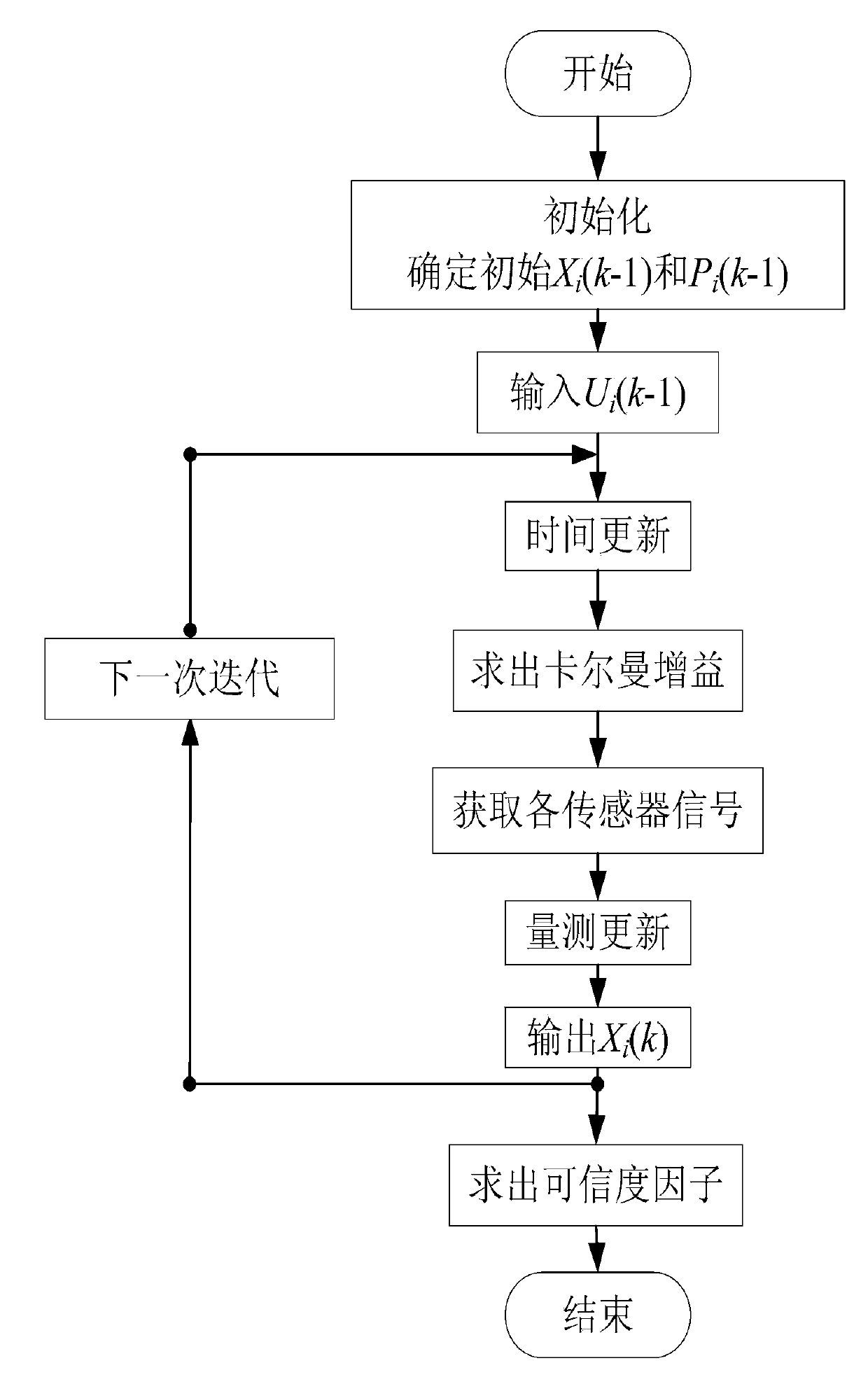
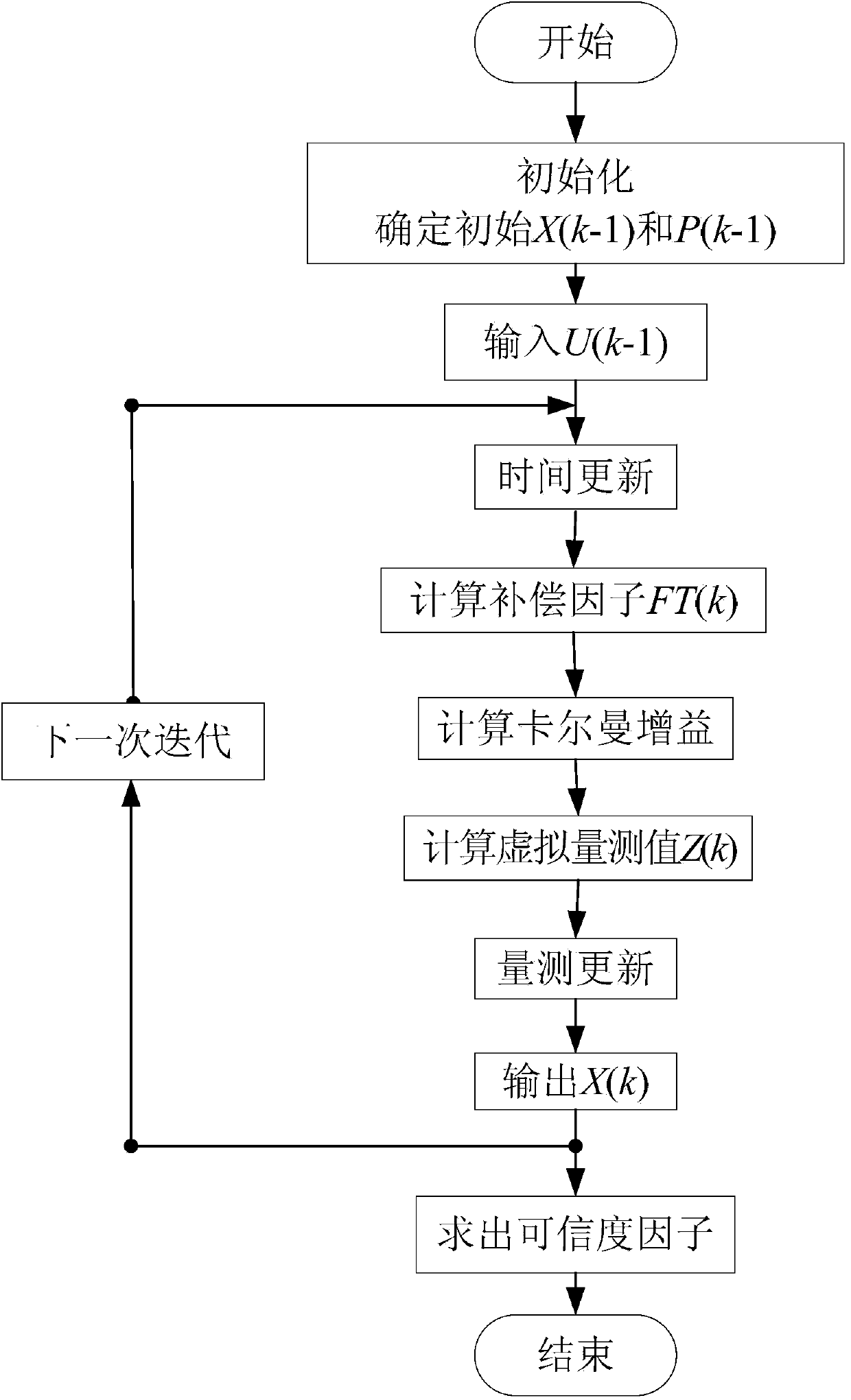
[0101] (1) Construction of parallel filtering subsystem
[0102] The Kalman filter is an optimal autoregressive data processing algorithm. First, a discretely controlled process system is introduced, which can be described by stochastic linear differential equations:
[0103] X(k)=AX(k-1)+BU(k-1)+M(k-1) (1)
[0104] Plus the measurement equation for the system:
[0105] Z(k)=HX(k)+V(k) (2)
[0106] In the above two formulas, X(k) is the state of the system at time k, and U(k) is the control qu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More