

Multi-terrain intelligent mobile platform and control method thereof
A mobile platform, multi-terrain technology, applied in three-dimensional position/channel control, two-dimensional position/channel control and other directions, can solve problems such as insufficient detection capability, achieve stable and reliable data transmission, and achieve the effect of data transmission
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
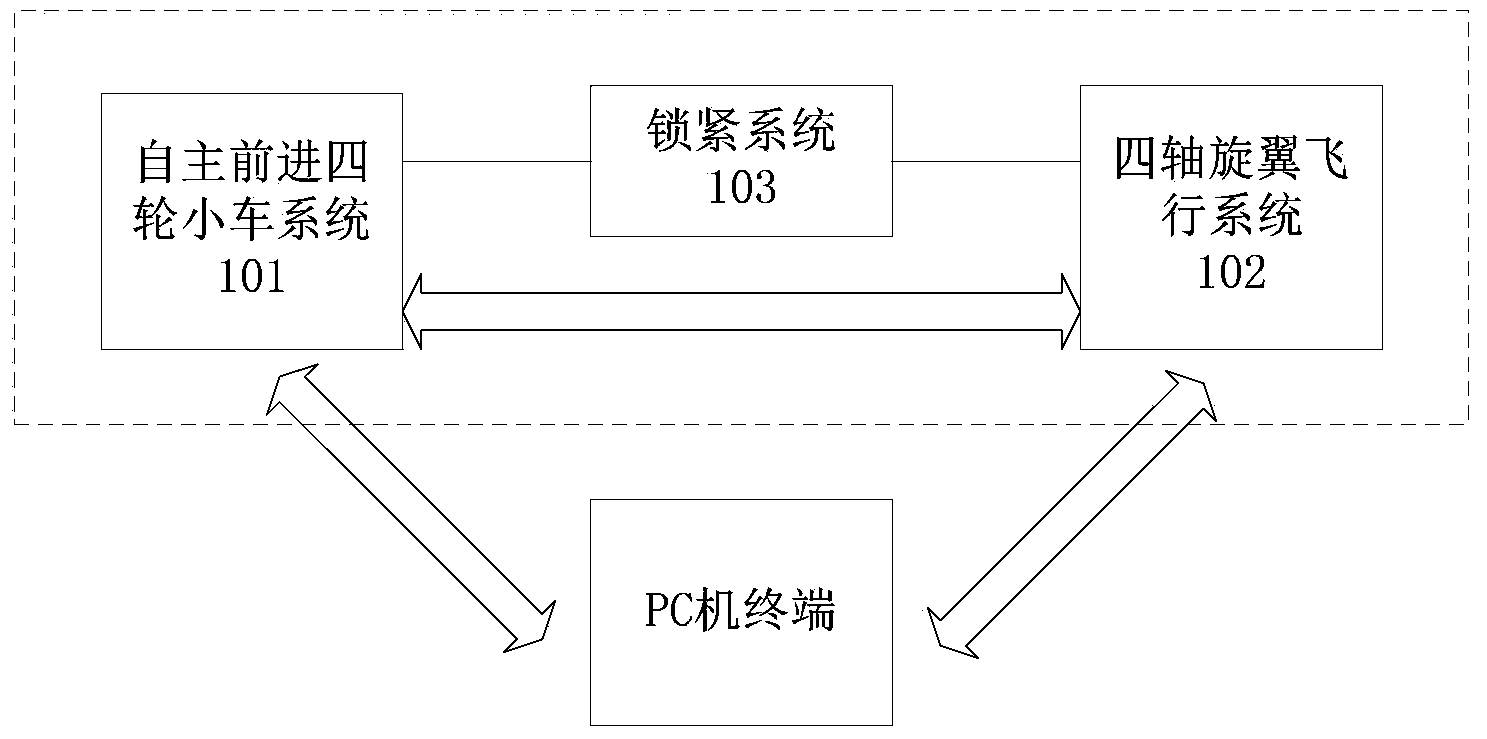
[0048] exist figure 1 Among them, the self-advancing four-wheel trolley system 101 and the four-axis rotor flight system 102 are connected through the locking system 103, and the self-progress four-wheel trolley system 101, the four-axis rotor flight system 102 and the PC terminal communicate through the Zigbee wireless transmission network .
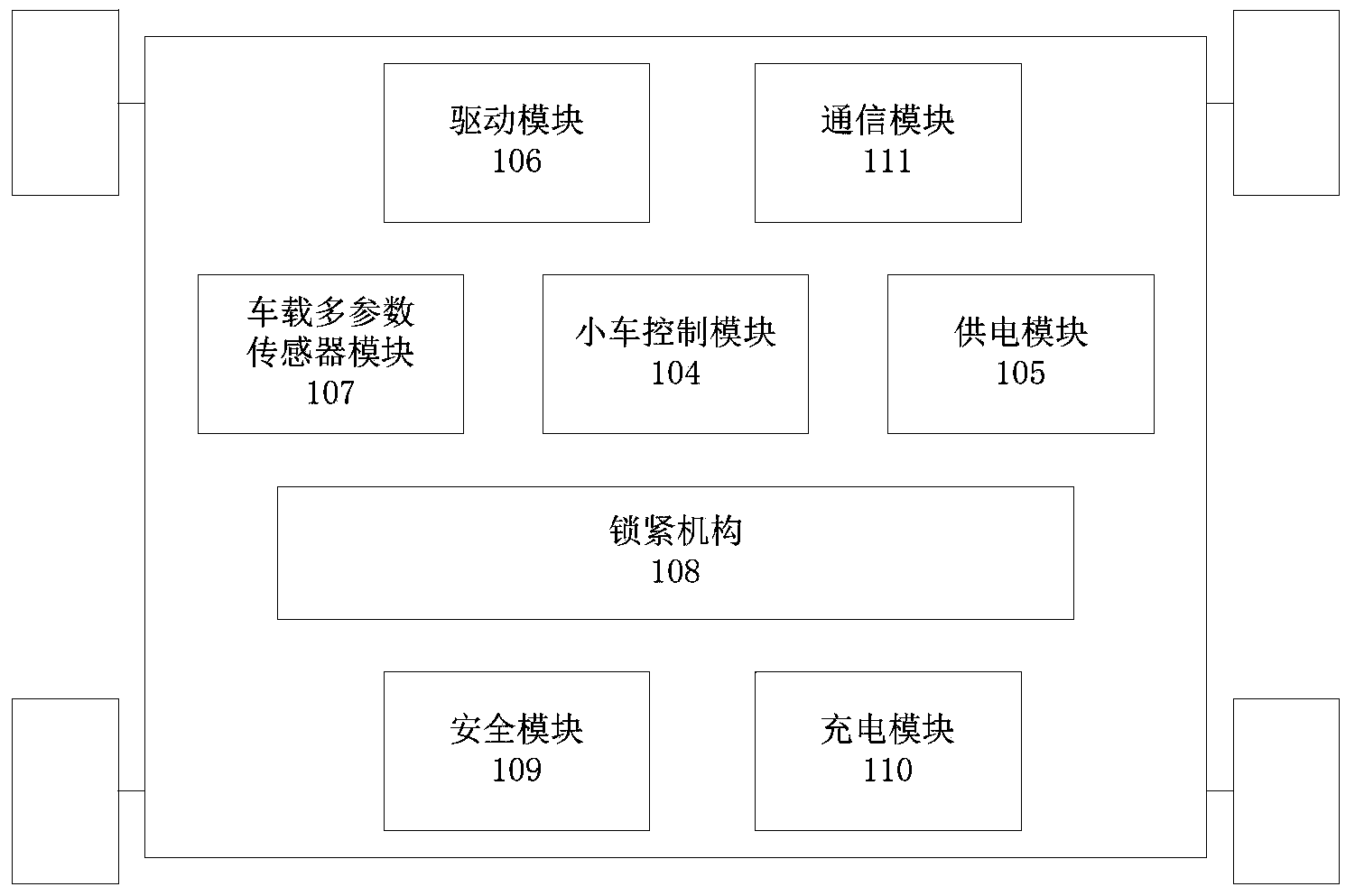
[0049] exist figure 2 Among them, the trolley control module 104 is the core of the self-advancing four-wheel trolley system 101, and the Arduino contro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More