

A rotating and adjustable binocular vision target recognition and positioning device and its application in agricultural fruit picking machinery
A technology of target recognition and binocular vision, which is applied to agricultural machinery and implements, picking machines, character and pattern recognition, etc. It can solve the problems of limited fruit recognition range, failure to pick fruits, and inability to adjust the viewing angle, etc., to achieve rapid recognition and Accurately locate the target, optimize the effect of recognition and positioning, and improve the effect of efficiency and automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
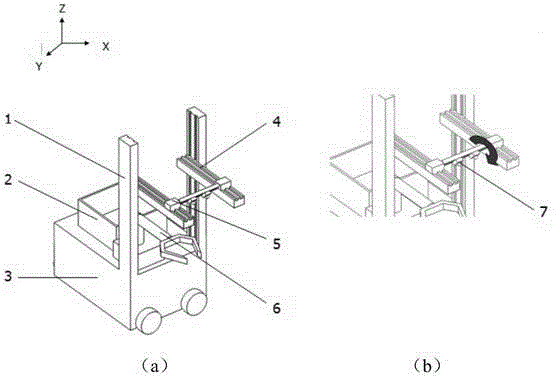
[0028] This experiment example takes wolfberry fruit picking machine as an example to illustrate. The Lycium barbarum of Xiaolinguo grows vertically and vertically, and the height and angle are inconsistent. During the picking process, the Lycium barbarum plant needs to be pulled to a nearly horizontal position. Different from picking a single citrus, there are many small fruits of wolfberry growing on the length of a branch (that is, a plant), and they grow in different positions on the branch. Agricultural fruit picking machines need to pick all the small fruits on one branch at a time. For each picking, the height and angle of the fruit and fruit branches are different, so it is necessary to adjust the visual angle, expand the range of detection targets, give the spatial coordinates of the fruits and branches on the branches, and provide positioning coordinate data for agricultural fruit picking machinery.
[0029] Such as figure 1 As shown in a and b, the agricultural fru...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More