

Fuzzy sliding mode trajectory tracking control method for SCARA robot
A trajectory tracking and control method technology, which is applied in the direction of program control, general control system, control/regulation system, etc., to achieve the effect of improving trajectory tracking speed, improving tracking speed and accuracy, and ensuring smoothness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0024] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
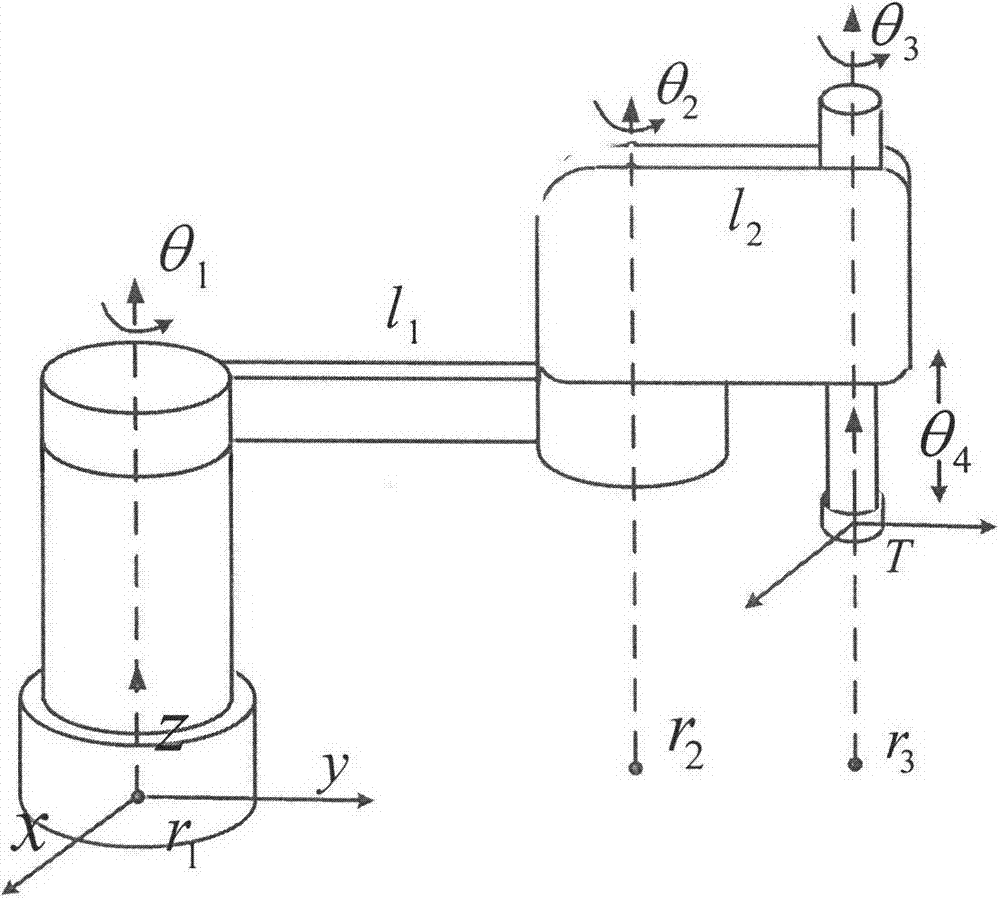
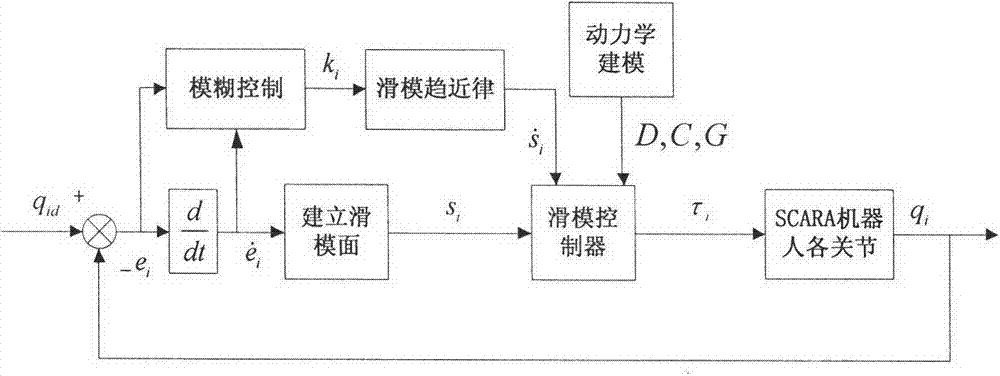
[0025] The basic thinking of the present invention is: provide a kind of trajectory tracking control method of improved SCARA robot: it does not need to know the precise mathematical model of controlled object; And has strong robustness, high tracking precision, fast tracking speed; And Improve the moment impact problem caused by the large initial error. The present invention first carries out dynamic model to SCARA robot, obtains the estimated value of moment of inertia, centripetal force and Coriolis moment, gravitational moment of SCARA robot; Convergence speed, while eliminating the shortcomings of the singularity of the traditional fast terminal sliding mode surface when the state variable is less than zero; the pres...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More