

Mixed visual system calibration method based on Kinect camera
A technology of hybrid vision system and calibration method, applied in the field of hybrid vision system calibration based on Kinect camera, can solve the problems of placing in a known ideal position, reconstruction result error, low solution accuracy, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Attached below Figure 1-7 The present invention will be described in further detail with reference to specific embodiments.
[0058] Such as Figure 7 As shown, the present invention provides a kind of hybrid vision system calibration method based on Kinect camera, at first the panoramic camera is calibrated to obtain the internal parameters of the panoramic camera, and the calibration board based on the checkerboard is set to create a checkerboard coordinate system, in space Construct a virtual camera projection plane located in front of the panoramic camera coordinate system, and calculate the transformation matrix from the virtual camera projection plane to the checkerboard coordinate system, which is characterized in that:
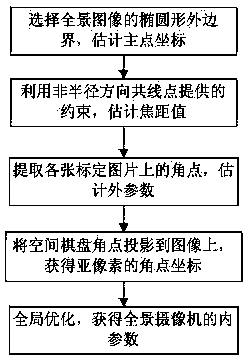
[0059] Described panoramic camera is demarcated, the method that obtains the inner parameter of panoramic camera is: the upper focal point of the catadioptric mirror of setting panoramic camera is O m , the lower focus is O o , all incident ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More