

Intelligent glass cleaner and its control method
A smart glass and cleaner technology, applied in cleaning equipment, window cleaning, home appliances, etc., can solve problems such as inconvenient use, danger, and poor urban environment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
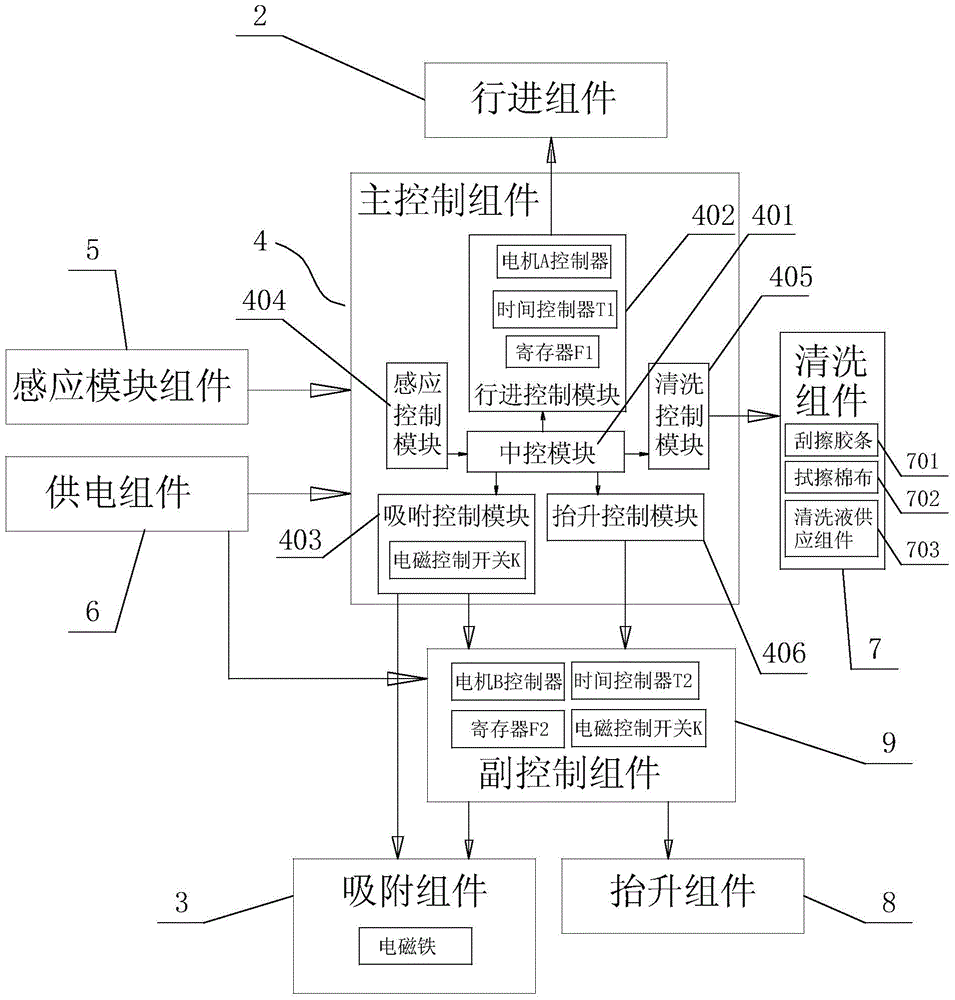
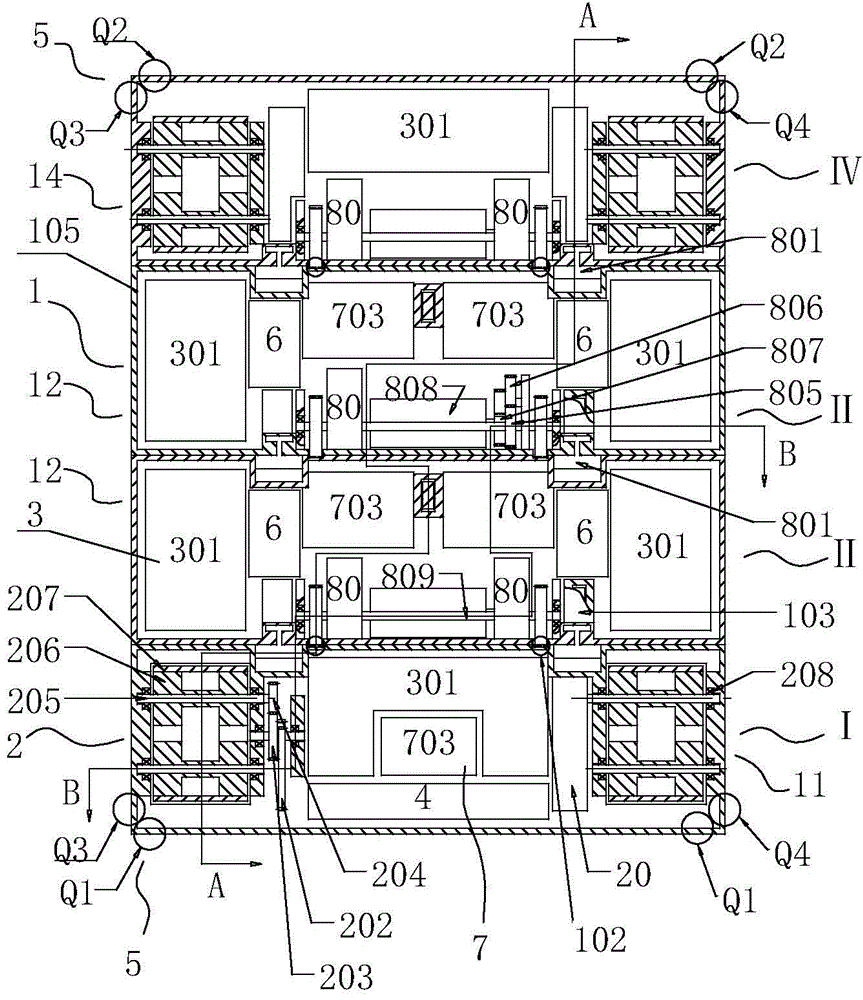
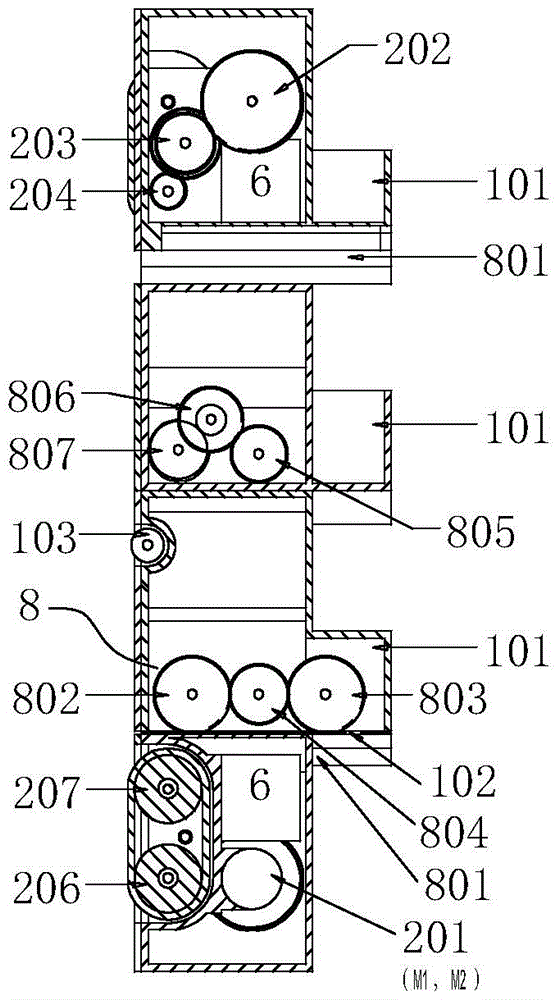
[0094] Figure 1-Figure 4 Disclosed in is an intelligent glass cleaner, including a housing assembly 1, a traveling assembly 2 installed in the housing assembly 1, an adsorption assembly 3, a main control assembly 4, an induction module assembly 5, a power supply assembly 6, a cleaning assembly 7, a lifting Component 8, sub-control component 9;
[0095] The traveling assembly 2 is used to realize the reciprocating process of the whole mechanism moving forward and backward under the control of the main control assembly 4;
[0096] The adsorption component 3 is used to achieve adsorption on both sides of the glass through magnetic attraction under the control of the main control component 4 or the secondary control component 9;
[0097] The sensing module component 5 is used to realize the signal collection of the whole mechanism to the outside world, and transmit the collected signal to the main control component 4;
[0098] The power supply assembly 6 is used to provide powe...
Embodiment 2
[0117] A control method for an intelligent glass cleaner, the method comprising the following steps:
[0118] S1. The electromagnet is energized;
[0119] S2. The register F1 of the travel control module of the main control assembly starts to collect and store location information and latch it;
[0120] S3. Detect whether it reaches the boundary, if yes, then directly enter step S5, if not, then enter step S4;
[0121] S4. advance, wipe the glass, repeat step S3;
[0122] S5. Judging whether to meet the jumping, if yes, then enter step S6, if not, then repeat step S3;
[0123] S6. Adjust the overturning position;
[0124] S7. Realize overturning, repeat step S2 until the cleaning work is finished.
[0125] The travel control steps in the above-mentioned step S4 are as follows:
[0126] S41. The whole machine is started, when the touch sensors Q2 and Q3 are touched at the same time, the left motor A M1 and the right motor A M2 rotate forward at a constant speed, and the wh...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More