

pid type fuzzy logic control method based on weight rule table
A fuzzy logic and control method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as reducing the accuracy of fuzzy rule tables, difficult balance, and limiting the popularization and application of PID fuzzy logic control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
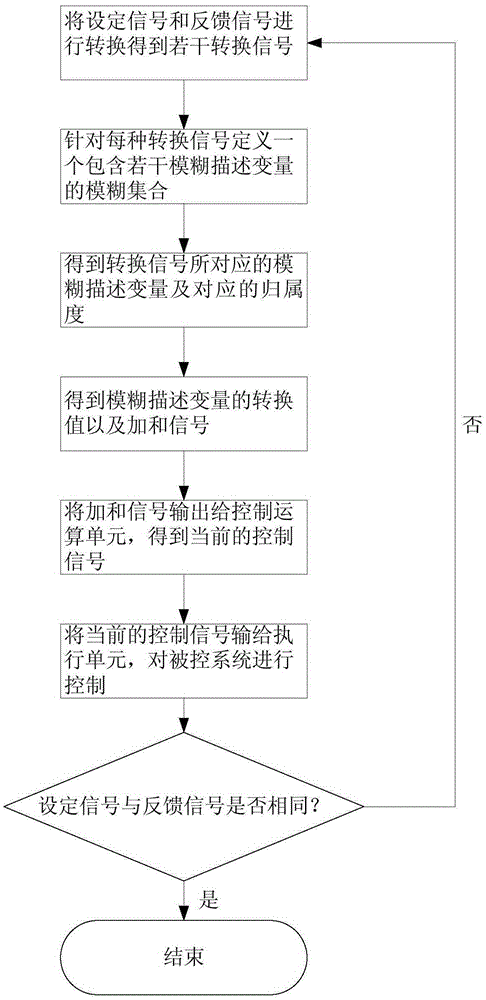
[0091] Such as figure 1 As shown, a PID type fuzzy logic control method based on the weight rule table includes the following steps:
[0092] 1) Convert the setting signal and feedback signal through the PID signal conversion unit to obtain several conversion signals.
[0093] Among them, the setting signal is r(t), the feedback signal is y(t), the conversion signal obtained by inputting the setting signal r(t) and the feedback signal y(t) into the PID signal conversion unit is the differential signal e(t), At least one of the three types of integral signal i(t) and differential signal d(t), where differential signal e(t)=y(t)-r(t), integral signal i(t)=∑e(t )*ts, differential signal d(t)=[e(t)-e(t-1)] / ts, ts is the sampling time unit.
[0094] 2) Define a fuzzy set containing several fuzzy description variables for each conversion signal, each fuzzy set has a corresponding belonging function, and define a corresponding weight value for each fuzzy description variable.
[0...
Embodiment 2
[0108] A PID type fuzzy logic control method based on a weight rule table of an air-conditioning system is characterized in that, comprising the following steps:
[0109] 1) Convert the room temperature setting signal and room temperature feedback signal through the PID signal conversion unit to obtain several conversion signals;
[0110] Among them, the room temperature setting signal is r(t), the room temperature feedback signal is y(t), the room temperature setting signal r(t) and the room temperature feedback signal y(t) are input into the conversion signal obtained by the PID signal conversion unit There are two kinds of differential signal e(t) and differential signal d(t), where differential signal e(t)=y(t)-r(t), differential signal d(t)=[e(t)-e( t-1)] / ts, ts is the sampling time unit.
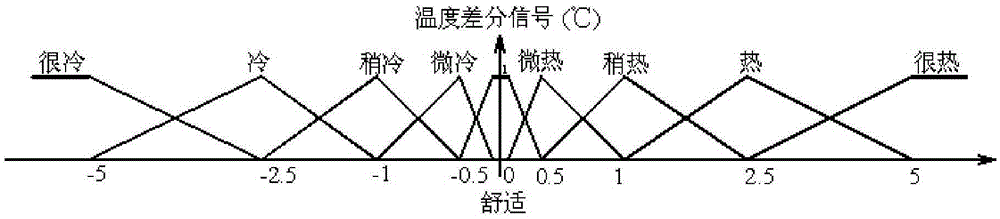
[0111] 2) Define a fuzzy set containing several fuzzy description variables for each conversion signal, each fuzzy set has a corresponding belonging function defined, and define a cor...
Embodiment 3
[0163] A PID type fuzzy logic control method based on a weight rule table of a central chilled water air conditioner comprises the following steps:
[0164] 1) Convert the water supply pressure setting signal of the water loop and the water supply pressure feedback signal of the water loop through the PID signal conversion unit to obtain several conversion signals.
[0165] Among them, the water supply pressure setting signal is r(t), the water supply pressure feedback signal is y(t), and the water supply pressure setting signal r(t) and the water supply pressure feedback signal y(t) are converted signals obtained by inputting the PID signal conversion unit It is at least one of the three types of differential signal e(t), integral signal i(t) and differential signal d(t), where differential signal e(t)=y(t)-r(t), and integral signal i(t)=∑e(t)*ts, differential signal d(t)=[e(t)-e(t-1)] / ts, ts is the sampling time unit.
[0166] 2) Define a fuzzy set containing several fuzzy ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More