

Novel automatic manipulator
A manipulator and automatic technology, applied in the field of manipulators, can solve the problems of reducing production efficiency, falling of materials, and inaccurate positioning of the lowering position, so as to improve production efficiency and avoid falling.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
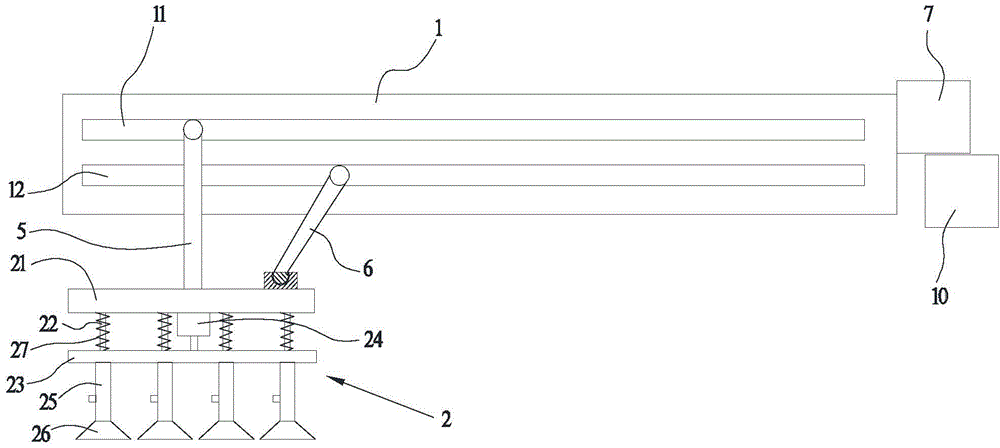
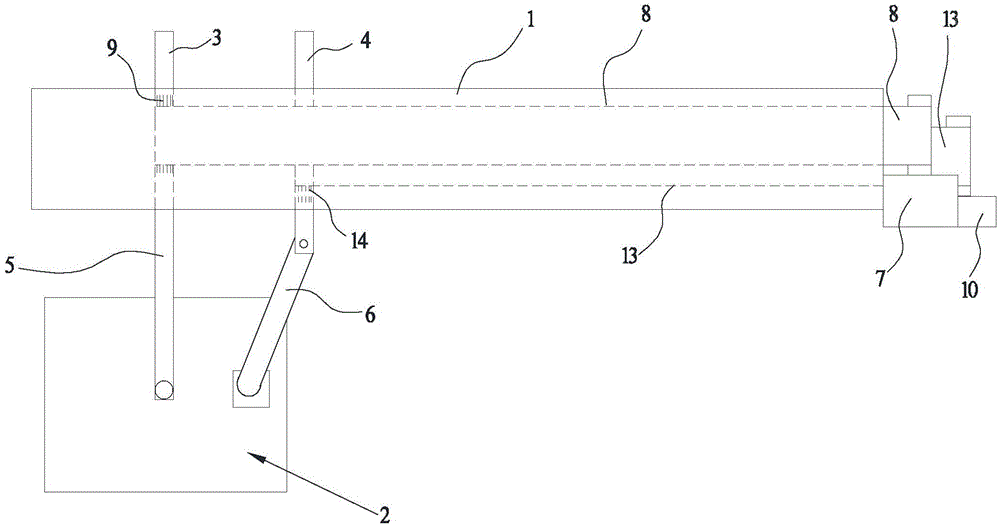
[0015] Such as figure 1 A new type of automatic manipulator is shown, including a guide rail 1, a gripping part 2, a first slide bar 3, a second slide bar 4, a first drive device, a second drive device, a first connecting rod 5 and a second connecting rod 6. The guide rail 1 is provided with a first chute 11 and a second chute 12 along the length direction of the guide rail 1. The first slide bar 3 slides and fits with the first chute 11 and protrudes from the first chute 11. The second slide bar 4 is slidably matched with the second slide slot 12 and protrudes from the second slide slot 12, and the first driving device is drivingly connected with the first slide bar 3 and drives the first slide bar 3 to slide along the first slide slot 11 , the second driving device is drivingly connected with the second slide bar 4 and drives the second slide bar 4 to slide along the second chute 12; the gripping part 2 is connected to the extended end of the first slide bar 3 through the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More