

Space tethered capturing system based non-cooperative target quality identification method
A non-cooperative target and identification method technology, applied in the field of non-cooperative target quality identification based on space tether capture system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0081] Below in conjunction with accompanying drawing, the present invention is described in further detail:
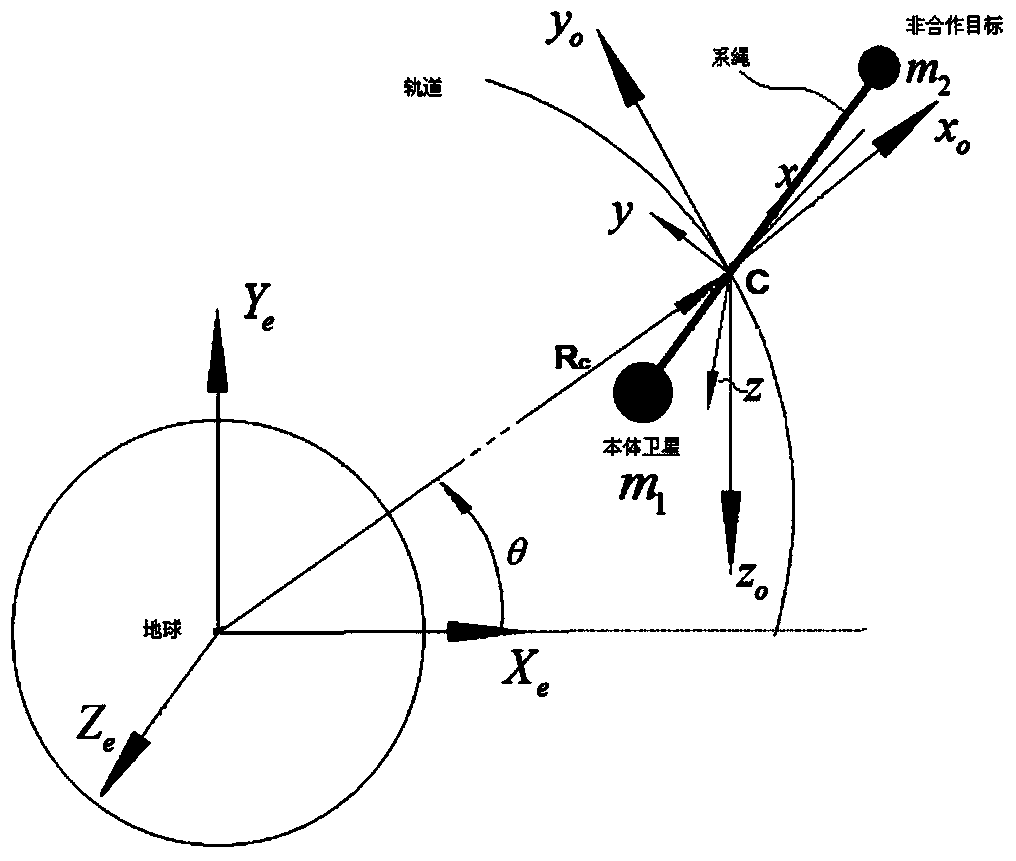
[0082] see figure 1 , the present invention mainly comprises the following steps:
[0083] Step 1: Determine the speed, position, and trajectory parameters of the space tethered robot system before capture and the speed, position, and trajectory parameters of the target to be captured, the length of the tether at the moment of capture, and the in-plane and out-of-plane swing angles of the tether angle, angular velocity;
[0084] The second step: according to the kinetic equations (19), (20) and (21) after the capture, analyze the in-plane swing angle motion and the out-of-plane swing angle motion of the tether after capture;
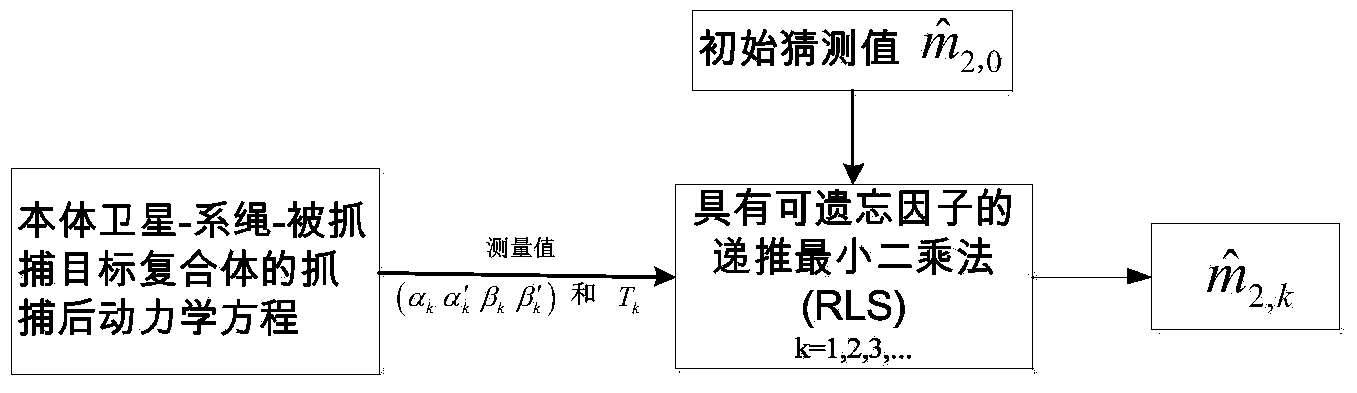
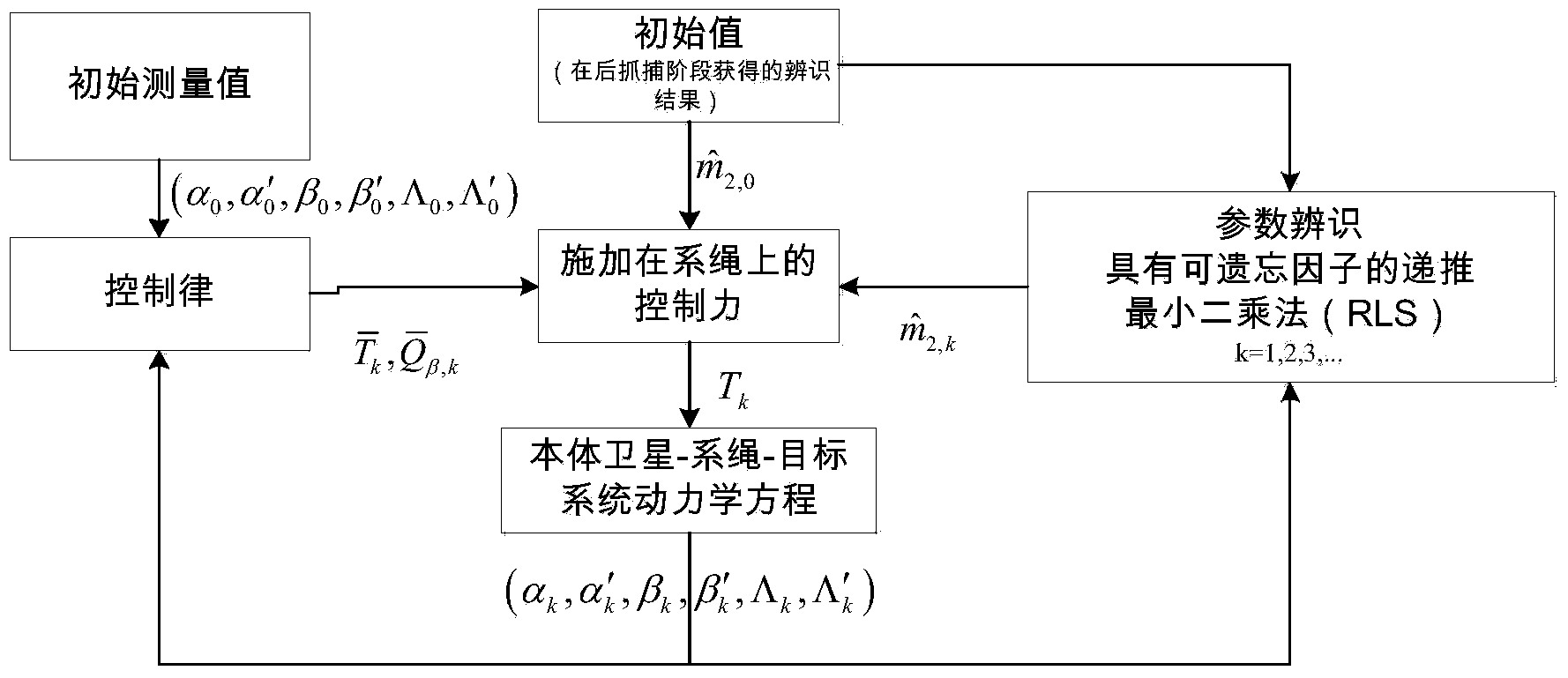
[0085] Step 3: If figure 2 As shown, in the process of parameter identification, the simulation system needs to be divided into two parts, one part simulates the real compound movement after capture and provides corresponding sensor informat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More