

Method for achieving tooth space compensation for flexible joint of space manipulator
A space manipulator and flexible joint technology, applied in manipulators, manufacturing tools, joints, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
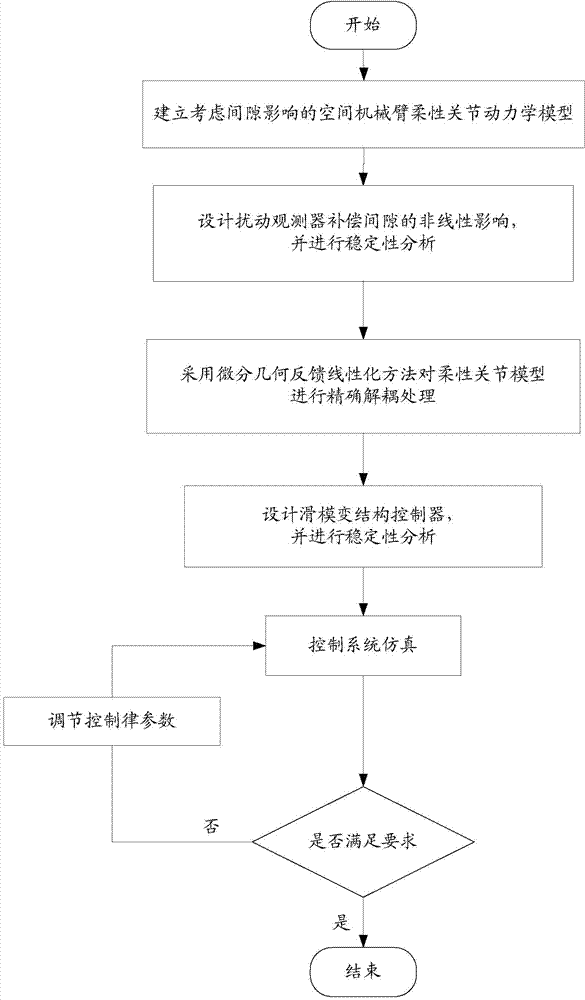
[0054] In order to better understand the technical solutions of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
[0055] It should be clear that the described embodiments are only some of the embodiments of the present invention, not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
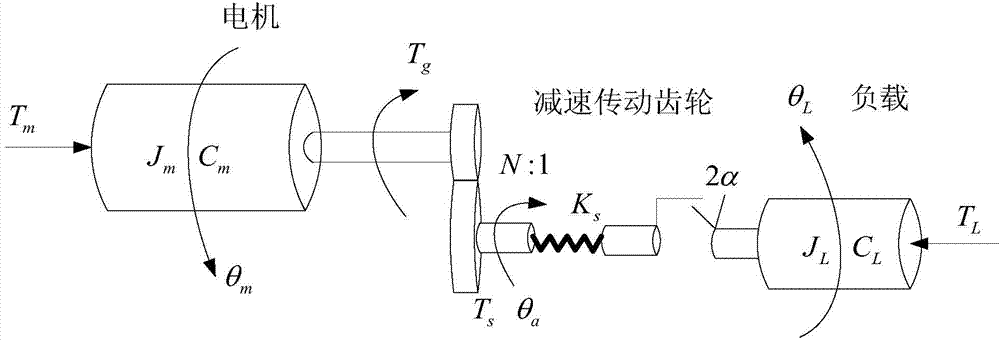
[0056] In the modeling process of the flexible joint of the space manipulator, the joint gear transmission gap is mainly considered. Due to the existence of the gap, the reversible transmission mechanism will produce hysteresis, so the relationship between the input shaft and the output shaft of the transmission mechanism is not linear, but A nonlinear relationship with hysteresis characteristics, so when the transmission mechanism is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More