

A two-degree-of-freedom cable robot based on compound drive technology
A robot, degree-of-freedom technology, applied in the field of robotics, can solve problems such as low efficiency, damage to protective layers, difficulty and danger
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the following specific embodiments are only used to illustrate the present invention but not to limit the scope of the present invention.
[0053] The accompanying drawings are only used as specific embodiments of the present invention.
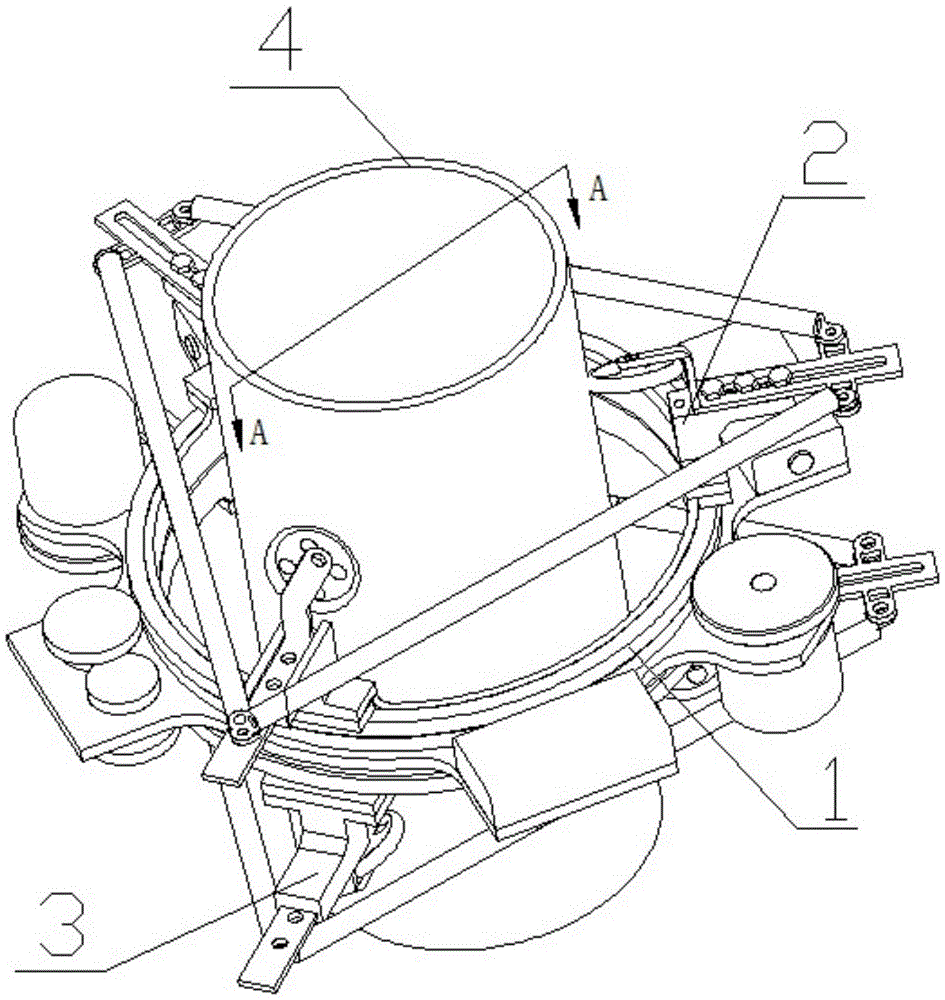
[0054] figure 1 It is a schematic diagram of the overall structure of the present invention. It can be seen from the figure that the present invention includes an intermediate driving mechanism 1, an upper rotating mechanism 2 and a lower rotating mechanism 3. Up and down sides.
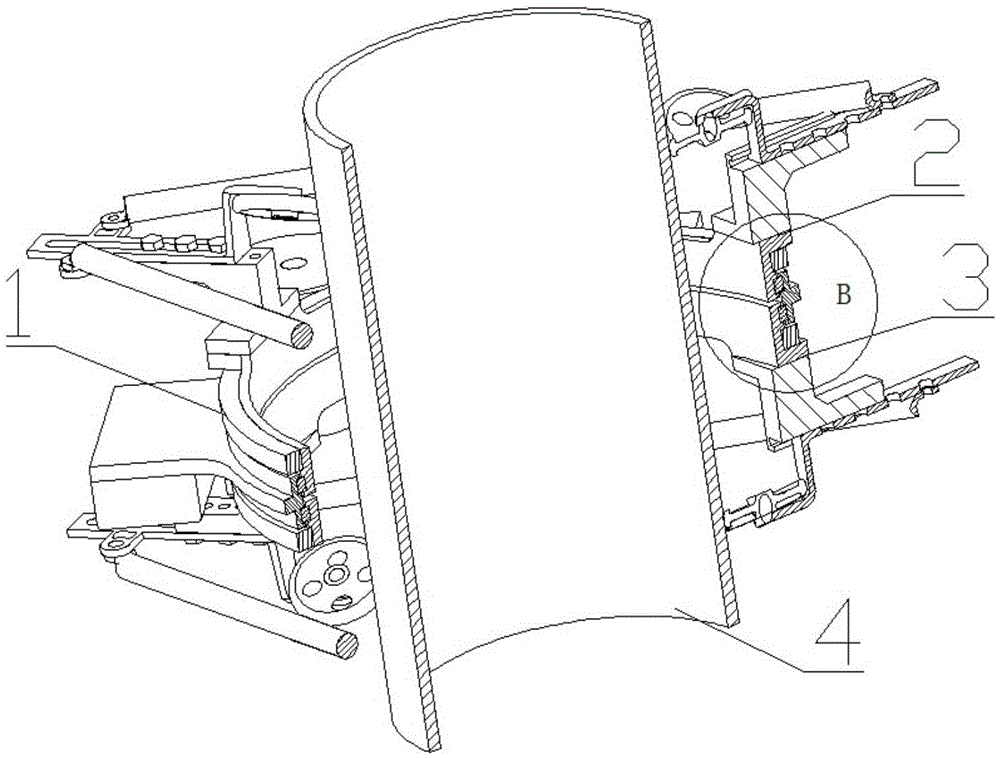
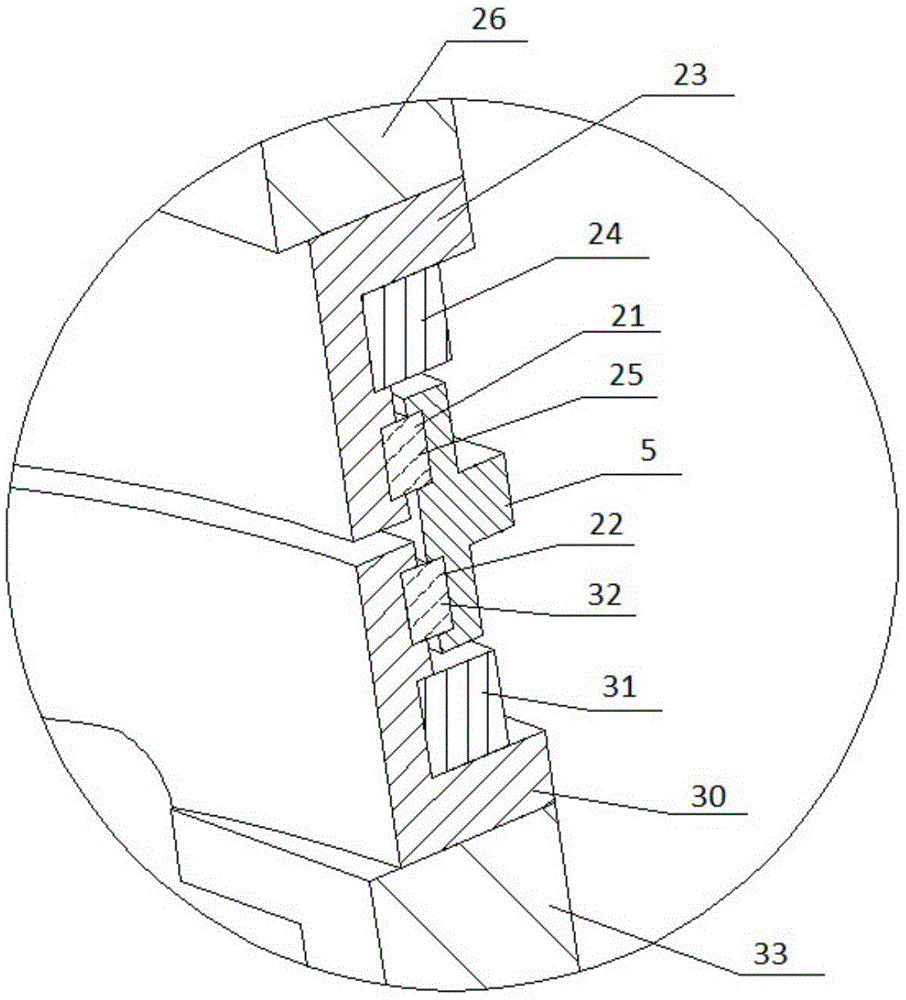
[0055] figure 2 yes figure 1 A-A cross-sectional view, image 3 yes figure 2 In the partial enlarged view of B, it can be seen from the combination of the two drawings that the upper rotating mechanism 2 and the lower rotating mechanism 3 are connected to the intermediate driving mechanism 1 .
[0...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More