

A Novel Bipedal Humanoid Robot System Based on Pneumatic Artificial Muscles
A technology of pneumatic artificial muscles and humanoid robots, which is applied in the field of bionic robots, can solve problems such as non-flexible mechanisms, and achieve the effects of strong movement ability, increased nonlinearity and uncertainty, and light mechanisms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
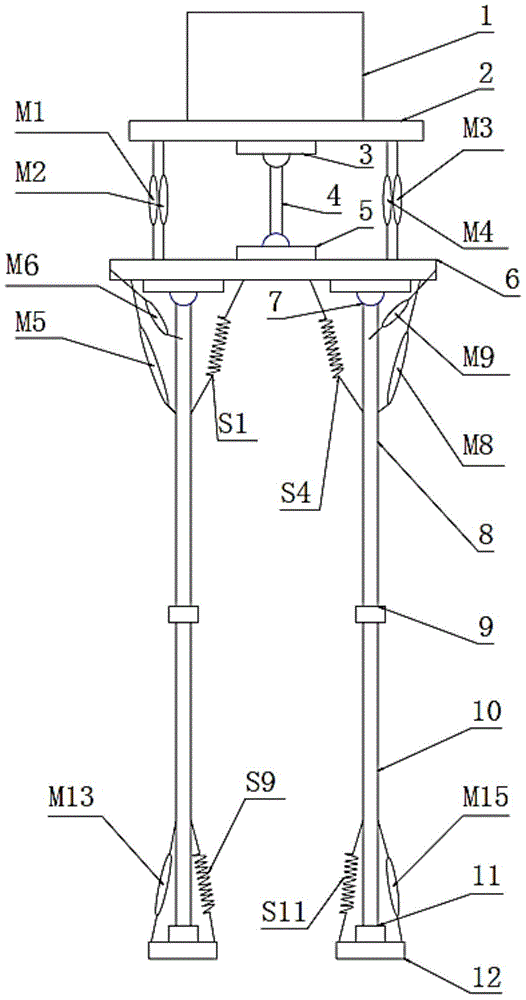
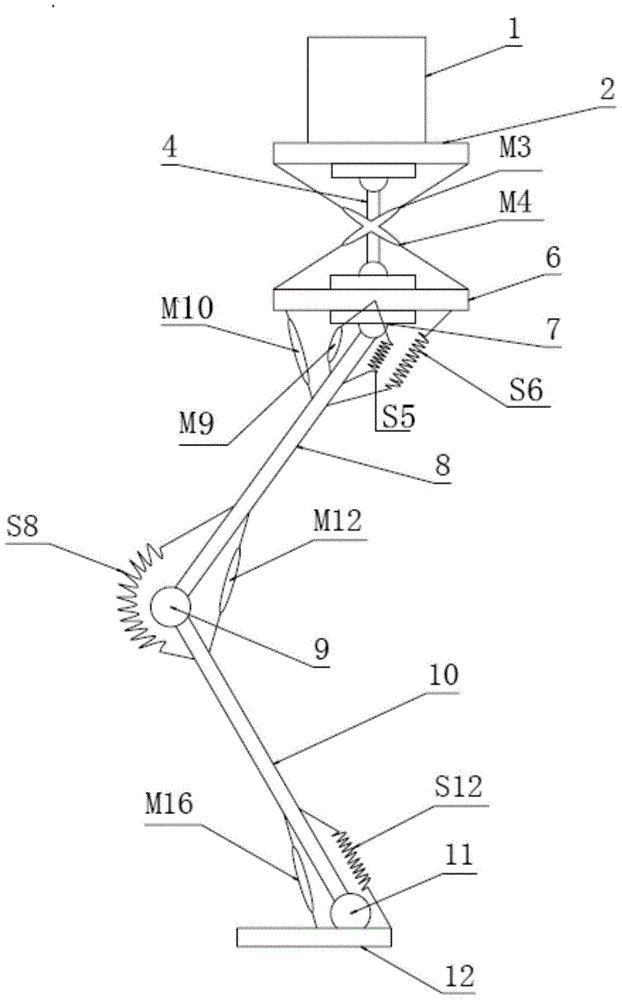
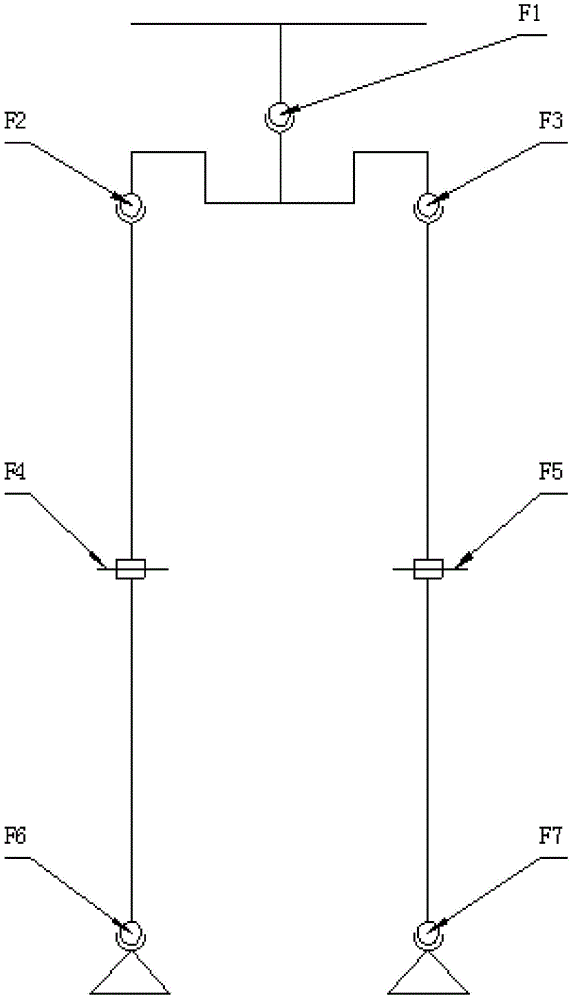
[0041] like Figure 1-5 As shown, a biped humanoid robot system driven by pneumatic artificial muscles, the system includes waist, hip joint, thigh, knee joint, calf, foot seven parts, a total of 13 DOF degrees of freedom, in which the waist (F1) : 3×1DOF, double hip joints (F2, F3): 3×2DOF, double knee joints (F4, F5): 1×2DOF, double ankle joints (F6, F7): 2×1DOF.
[0042] The system includes air compressor and air tank 1, upper body support 2, upper waist connecting bearing 3, waist support 4, lower waist connecting bearing 5, waist support 6, hip joint connecting bearing 7, robot thigh 8, robot knee joint 9, Robot calf 10, robot ankle joint 11, robot foot 12, pneumatic artificial muscles M1-M16, springs S1-S12, quick connectors J1-J7, interfaces j1-j17;
[0043] The air compressor and the gas tank 1 are installed on the upper bod...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More