

A four-degree-of-freedom high-speed parallel manipulator
A manipulator and degree of freedom technology, applied in the field of robotics, can solve the problems of poor operation stability of the manipulator, affecting the efficiency of the mechanism, and low sorting accuracy, and achieve the effects of convenient manufacturing and installation, small return error, and high transmission accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
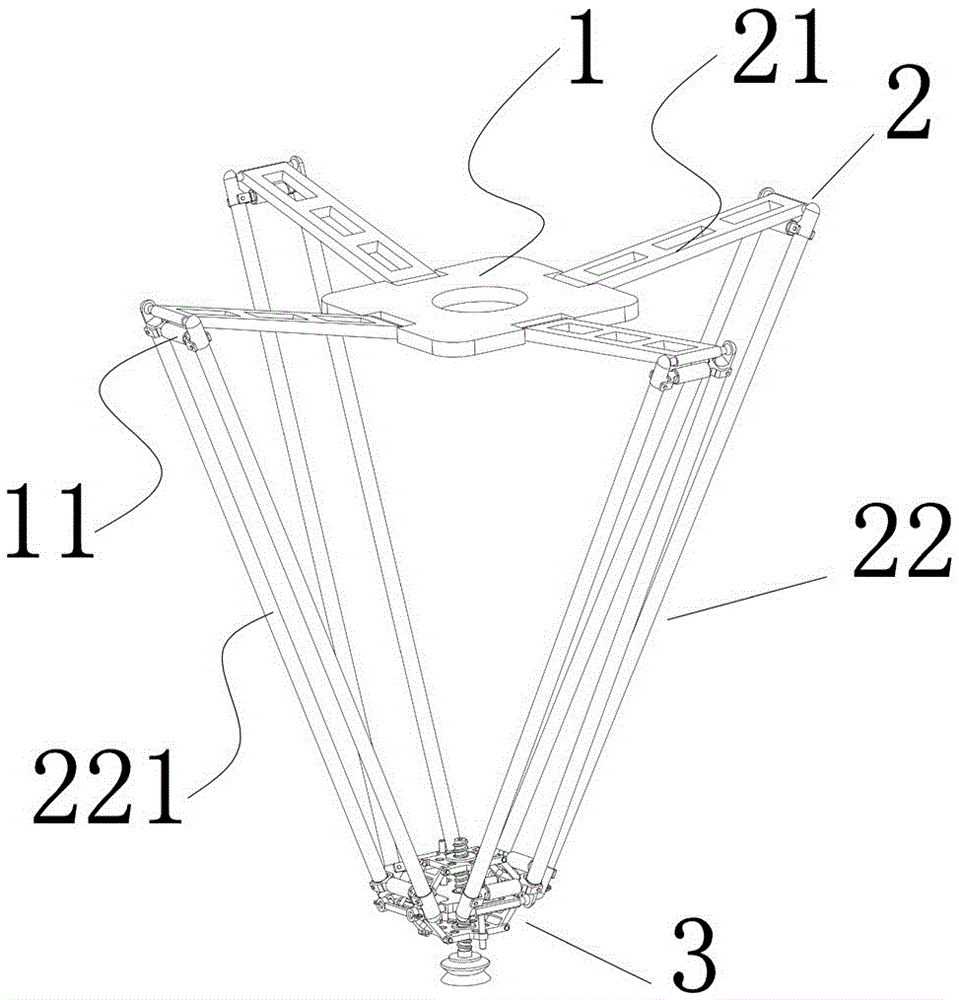
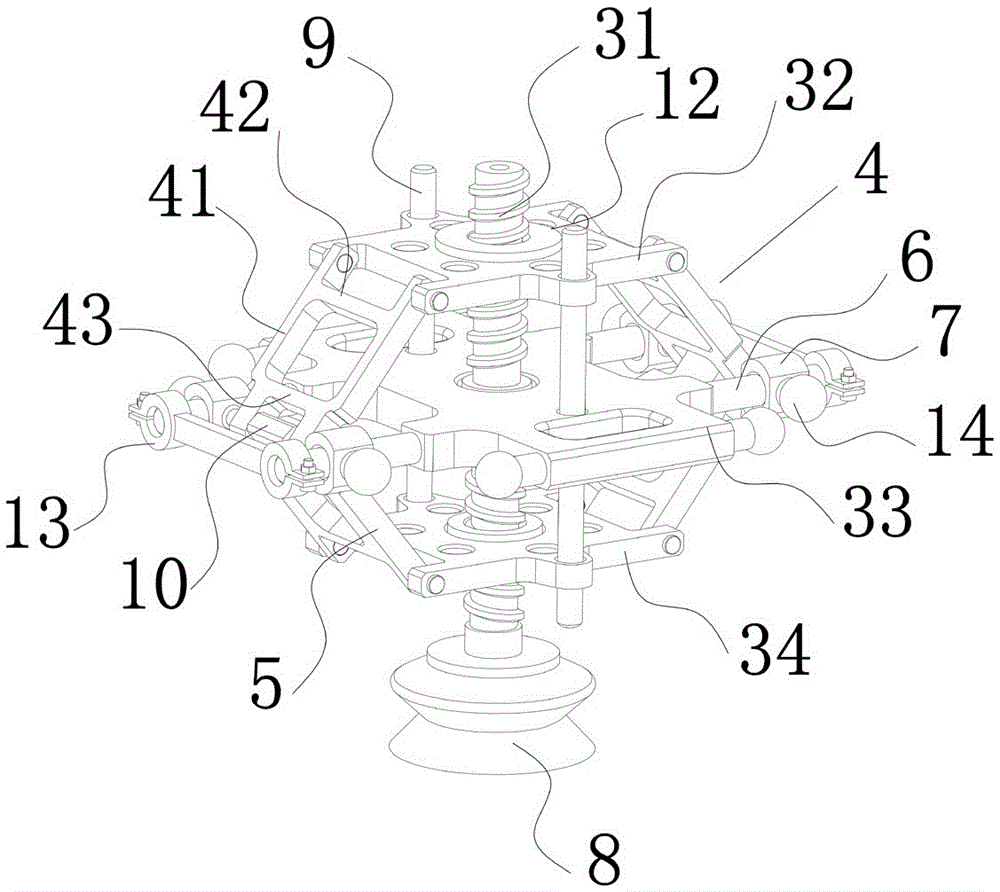
[0024] Such as figure 1 As shown, a four-degree-of-freedom high-speed parallel manipulator of the present invention includes a square static platform 1, and the static platform 1 is respectively connected to a boom 2 through the middle part of the edge of the four sides, and the boom 2 includes a rotating connection connected to the static platform 1. The active arm 21 on the top and the driven arm 22 that is rotatably connected to the lower end of the active arm 21. The driven arm 22 includes a pair of parallel driven connecting rods 221, and the driven connecting rods 221 are symmetrically connected to the lower end of the driving arm 21. On both sides of the driven arm 221, the other end of the driven connecting rod 221 is symmetrically hinged on the edge of the intermediate platform 33 through the ball joint 14, and a pulley is respectively arranged horizontally between the two driven connecting rods 221 close to the active arm 21 and the intermediate platform 33. tight sp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More