

A two-dimensional laser real-time detection method of workpiece surface contour
A two-dimensional laser and real-time detection technology, applied in the direction of measuring devices, optical devices, instruments, etc., can solve the problem of unable to stably extract straight line features
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be described in further detail below in conjunction with the accompanying drawings.
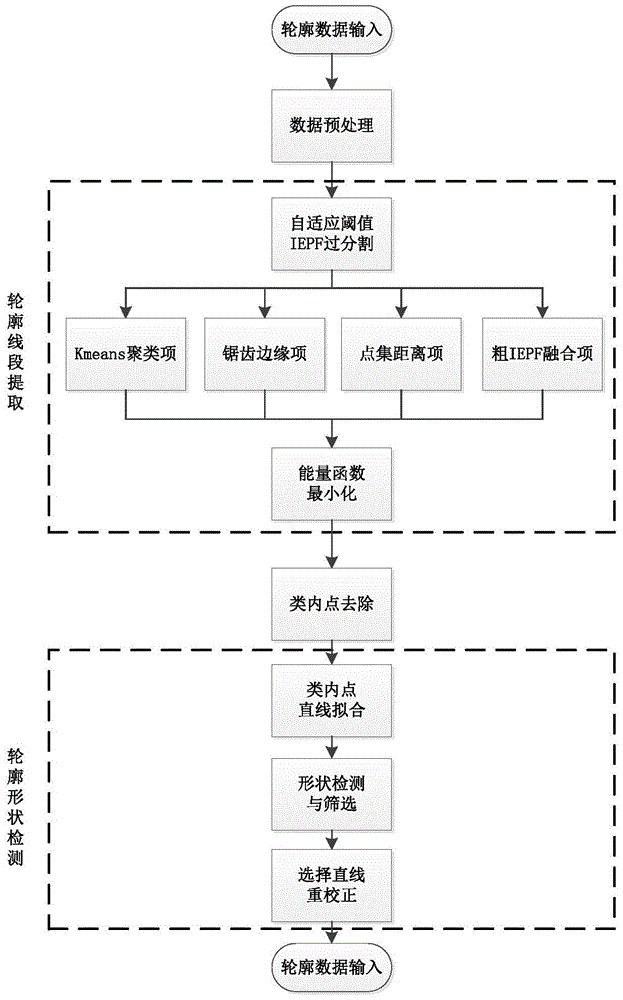
[0080] The invention provides a two-dimensional laser real-time detection method for the surface contour of a workpiece. figure 1 The overall flowchart of the method is divided into 4 major steps according to the flowchart, and the specific steps are as follows:
[0081] step one:
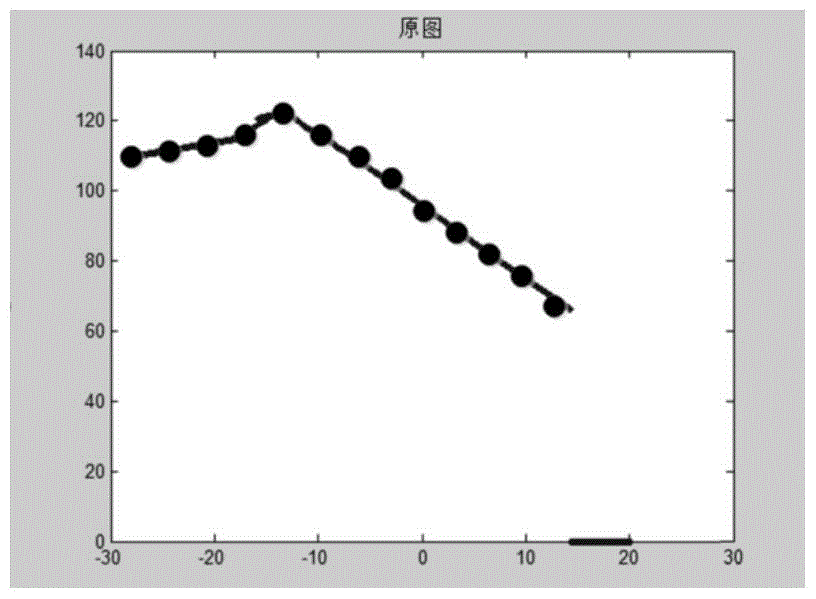
[0082] A frame of contour point data (such as figure 2 ), each point can be represented by the following symbols:
[0083] R={r 1 ,...,r l}.
[0084] Step two:
[0085] Preprocess the acquired contour point data, the preprocessing steps are:
[0086] (1) Zero value contour point removal
[0087] Due to the characteristics of the laser sensor, the distance of the environmental points beyond the range will be recorded as 0, so the contour points with zero values need to be removed.
[0088] (2) Repeated contour point removal
[0089] The laser sensor will obtain the con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More