

A dual inertial navigation joint rotation modulation navigation and online relative performance evaluation method
A rotation modulation, dual inertial navigation technology, applied in the field of online performance evaluation of inertial navigation, can solve the problem of gyro bias change, affecting navigation accuracy, not involving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
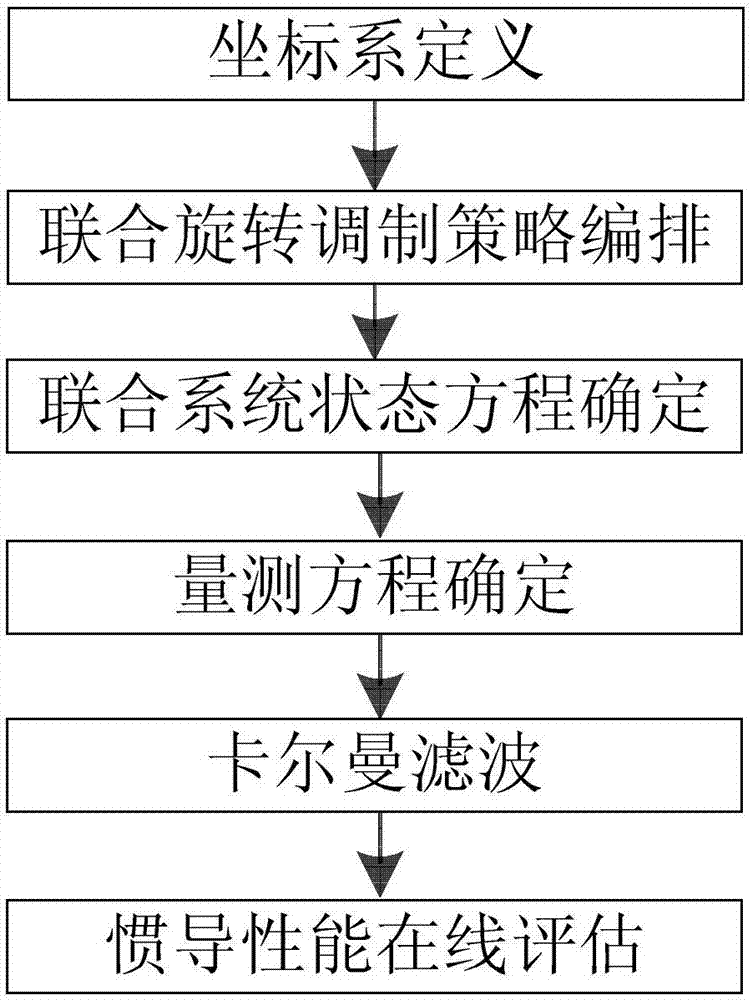
[0072] A preferred mode of the present invention will be described in further detail below in conjunction with the accompanying drawings.
[0073] Step 1: Coordinate system definition
[0074] Define the navigation coordinate system (n system) as the local horizontal geographic coordinate system, the coordinate axes point to north-east direction-ground direction (N-E-D) respectively, and the coordinate axes of the carrier coordinate system (b system) are along the roll axis-pitch axis- The yaw axis (front-right-down), the inertial measurement unit (IMU) coordinate system of inertial navigation system 1 and 2 are respectively s 1 , s 2 , the coordinate axes point to the same definition as the carrier coordinate system.
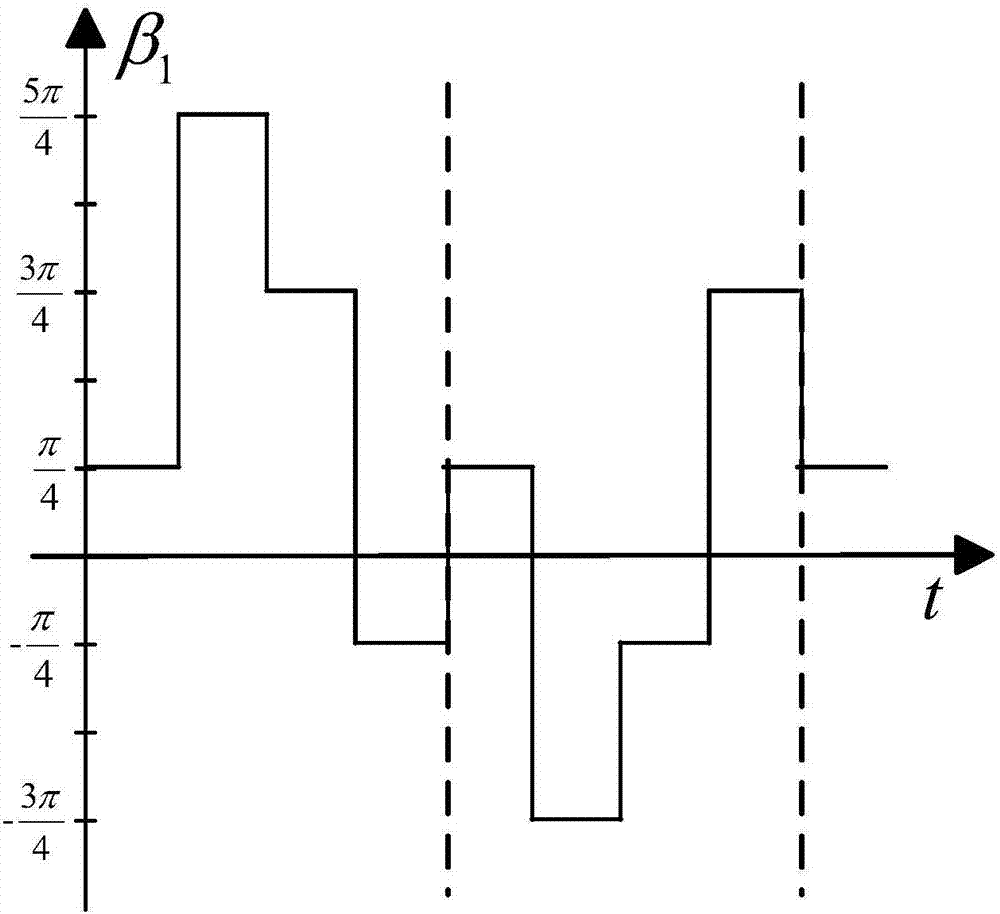
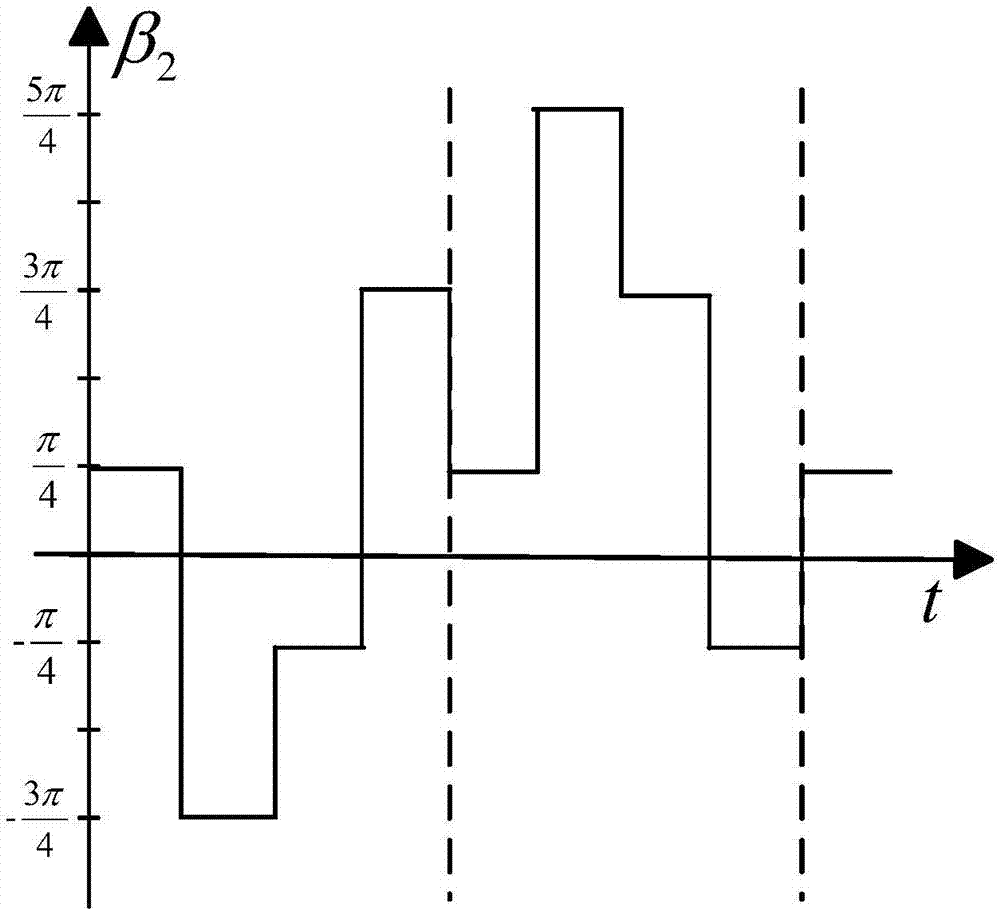
[0075] Step 2: Joint rotation modulation strategy orchestration
[0076] Inertial navigation systems 1 and 2 respectively perform 4-position and 8-sequence rotation modulation transposition around the azimuth axis, and inertial navigation systems 1 and 2 res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More