

Semi-passive walker driven by single motor and steering control method thereof
A single-motor-driven, walker technology, used in motor vehicles, transportation and packaging, can solve problems such as poor stability and robustness, difficult control, and large leg mass, reducing joint connection and control, reducing Low energy consumption and low leg mass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0045] The preferred embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings; it should be understood that the preferred embodiments are only for illustrating the present invention, rather than limiting the protection scope of the present invention.
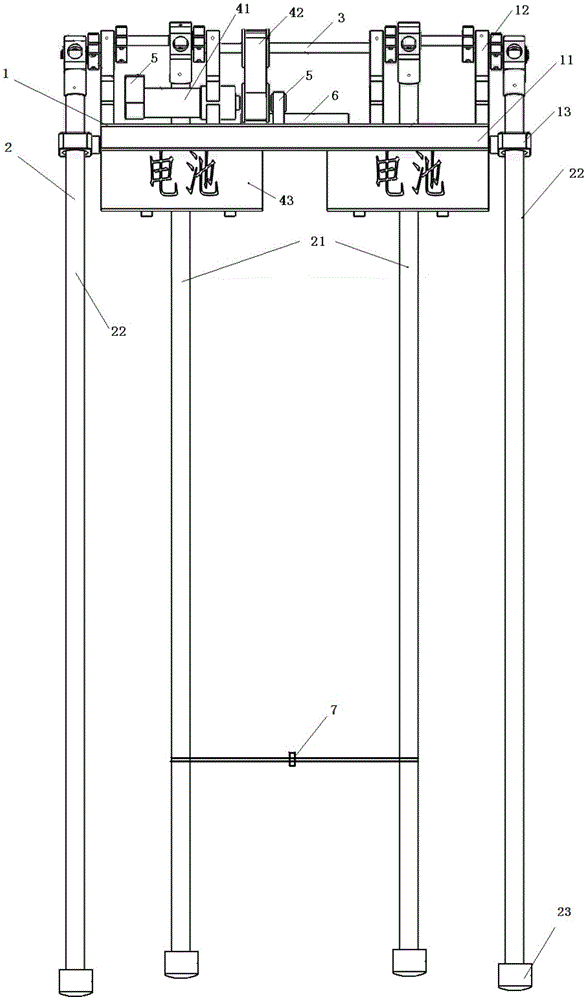
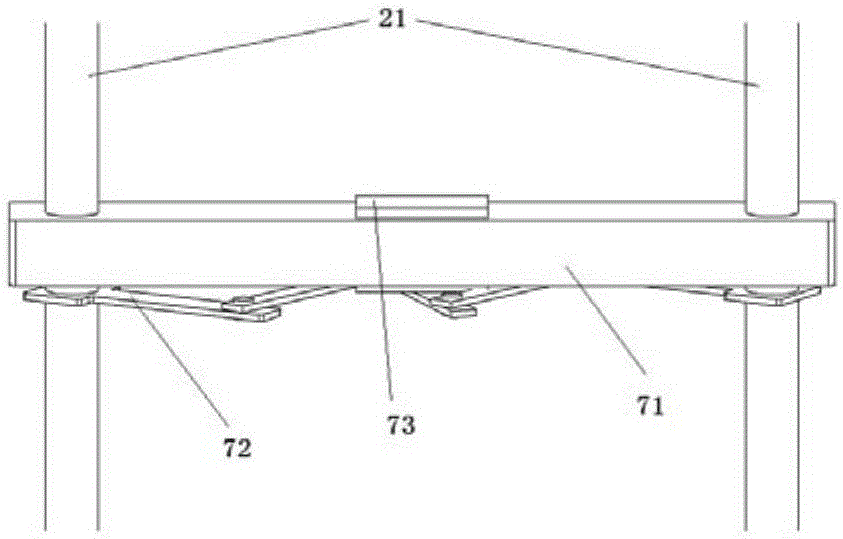
[0046] like figure 1 , 2, shown in 3, the semi-passive walking device driven by a single motor includes a traveling mechanism, a driving device for driving the traveling mechanism to walk, a steering device 7 for the steering of the walking device, and a data acquisition device for collecting walking data of the traveling mechanism 5 and a main control device 6 for providing a real-time walking scheme for the walking mechanism; the walking mechanism includes legs 2 and hips 1; the legs include inner legs 21 formed by two long straight legs and two long straight legs Outer leg 22 that leg is formed; Described inner leg and outer leg are connected by crankshaft 3, and de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More