Unmanned-plane horizontal-speed control method based on fusion of data of acceleration sensor and optical-flow sensor
An acceleration sensor and optical flow sensor technology, which is applied in the field of autonomous positioning of unmanned aerial vehicles based on data fusion of acceleration sensors and optical flow sensors, to achieve the effect of stable autonomous hovering
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The technical problem to be solved by the present invention is to provide a UAV autonomous positioning method based on the fusion of optical flow sensor and acceleration sensor data, so as to realize the fixed-point hovering of the UAV in an indoor environment.
[0040] The technical scheme adopted in the present invention is: adopt the method for optical flow sensor and acceleration sensor data fusion to be used in the positioning system of unmanned aerial vehicle, comprise the following steps:
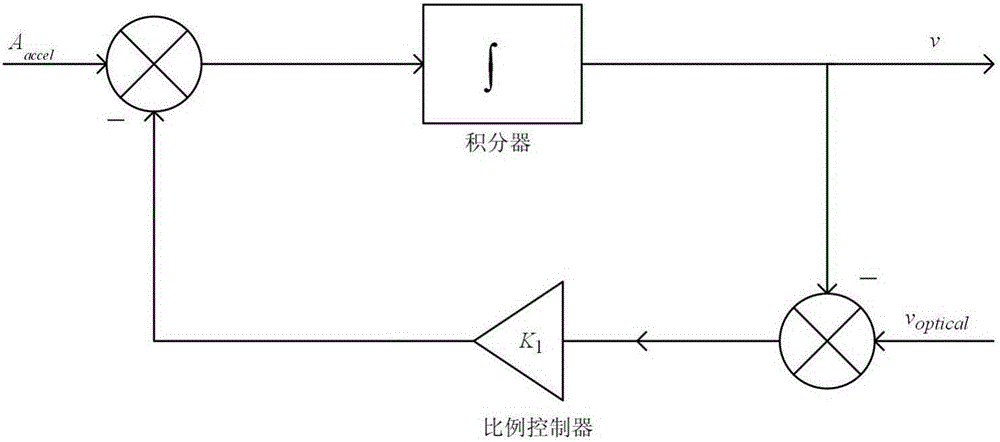
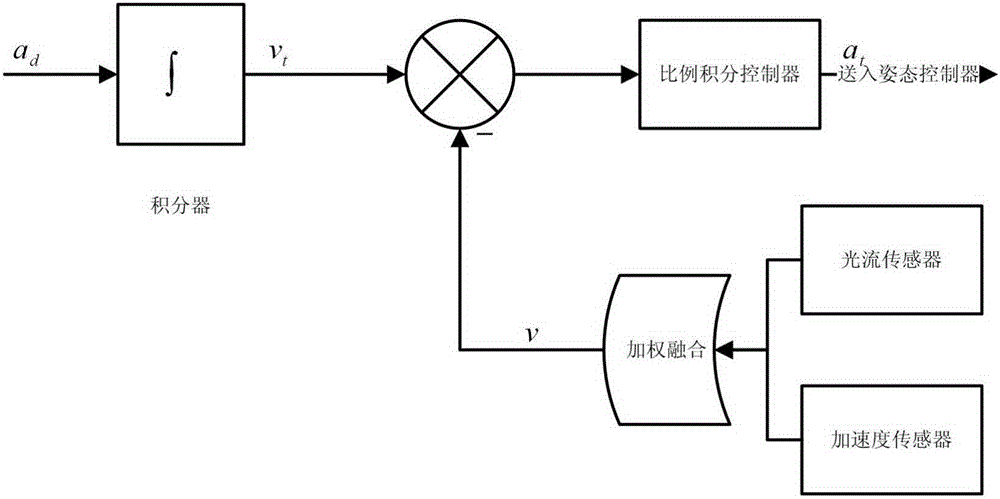
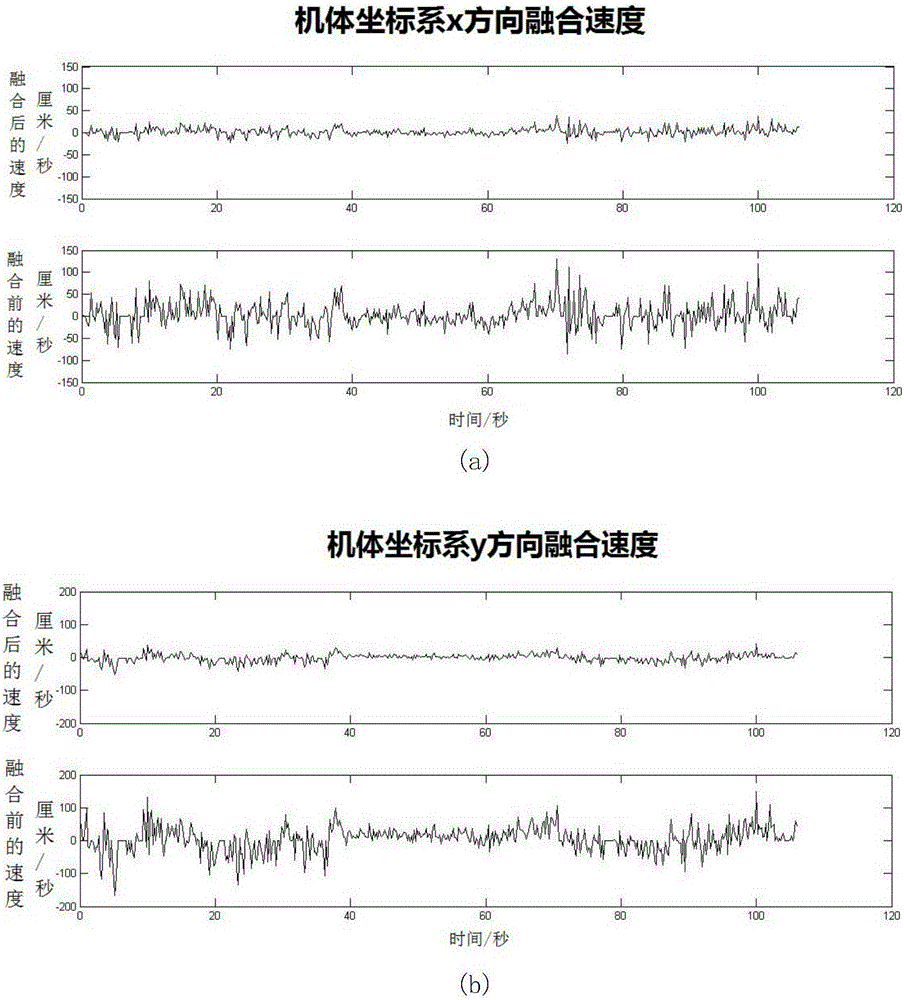
[0041] Use the optical flow sensor installed at the bottom of the quadrotor UAV to obtain the speed information and speed information processing of the UAV, use the acceleration sensor on the flight controller PCB board to obtain the acceleration position information of the UAV, and use a complementary filter to convert the above The data is fused to obtain a more accurate relative speed between the UAV and the ground.
[0042] The speed information and speed information proce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com